- Melayu
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC Dijelaskan: Fungsi, Jenis, dan Aplikasi
Katalog

Meneroka PMIC
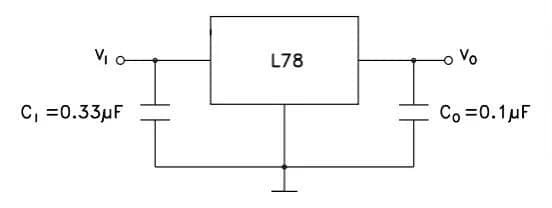
PMIC (Litar Bersepadu Pengurusan Kuasa) adalah IC khusus yang menerima satu atau lebih input kuasa dan menghasilkan beberapa rel kuasa yang terkawal dan diselaraskan untuk beban yang berbeza pada papan. Beban tersebut sering merangkumi pemproses, ingatan, seksyen RF, sensor, dan pelbagai periferal.
Daripada menyebarkan pengatur diskret dan IC pengawas di seluruh reka bentuk, PMIC menggabungkannya ke dalam satu pengurus domain kuasa yang terkoordinasi. Bagi banyak pasukan, penggabungan ini juga membawa ketenangan fikiran semasa membawa naik, kerana terdapat satu tempat untuk melihat apabila rel bertindak ganjil.
Pemproses, ingatan, blok RF, sensor, dan beban lain.
Skop fungsional
Dalam produk sebenar, sumbangan PMIC melangkaui pengubahsuaian voltan. Manfaat praktikal muncul apabila ia bertindak seperti koordinator kuasa tahap sistem yang menghubungkan beberapa tanggungjawab yang secara semula jadi berinteraksi semasa boot, langkah beban waktu berjalan, dan keadaan ralat.
Penukaran
PMIC boleh menggabungkan jenis pengatur yang berbeza supaya rel kuasa yang fokus pada kecekapan dan rel kuasa yang sensitif terhadap bunyi boleh dioptimumkan secara berasingan. Dalam reka bentuk praktikal, kebimbangan utama sering bukan menjana voltan yang diperlukan, tetapi mengekalkan voltan yang stabil semasa perubahan beban, acara permulaan, dan keadaan operasi yang mencabar.
Pengatur buck, pengatur boost, pengatur buck-boost, dan pengatur LDO.
Rel yang kelihatan bersih pada beban yang stabil boleh menjadi tertekan secara jelas di bawah profil sebenar. Kecekapan, riak, tindak balas sementara, dan margin terma biasanya diperiksa dengan teliti apabila arus letupan CPU, denyutan penghantaran RF, atau lonjakan pensampelan sensor diuji di bawah keadaan operasi sebenar.
Letupan CPU, denyutan penghantaran RF, dan puncak pensampelan sensor.
Pengedaran
Setelah rel dihasilkan, PMIC sering menentukan bagaimana ia dikongsi, ditukar, dan diasingkan. Di sinilah reka bentuk boleh berasa sama ada kukuh atau rapuh, terutama semasa hot-plug, brownout, dan acara berkaitan kabel. Apabila pengedaran diuruskan dengan teliti, aliran permulaan dapat dikawal, laluan balik terhad, dan ralat kurang berkemungkinan untuk merosot kepada keruntuhan seluruh papan.
Enabler rel, suis beban, had arus, dan ORing diod ideal untuk input pelbagai sumber.
Pengesanan dan pengawasan
Kebanyakan PMIC mengintegrasikan pengawas yang sentiasa memantau kesihatan rel dan menyediakan isyarat yang boleh ditafsirkan oleh perisian dan perkakasan. Dalam makmal, ciri-ciri ini dengan cepat berhenti dirasakan sebagai tambahan yang bagus dan mula dirasakan sebagai perbezaan antara sesi debug yang bersih dan satu hari yang dihabiskan untuk mengejar tetapan semula yang enggan muncul atas permintaan.
Pemantau undervolt, pemantau overvolt, pengesanan overcurrent, pengesanan terma, dan isyarat kuasa baik.
Satu pengajaran yang cenderung melekat pada pasukan bring-up berpengalaman adalah bahawa ambang kuasa baik dan masa deglitch perlu jelas. Apabila ia tidak jelas atau tidak sepadan dengan sistem, hasilnya sering kali adalah pengaturan semula palsu atau kegagalan boot hantu yang hanya muncul di sudut suhu, pada bateri tertentu, atau selepas urutan reboot yang cepat.
Kawalan dan urutan
Sebuah PMIC sering kali merangkumi mekanisme untuk membentuk bagaimana rel naik, turun, dan berkoordinasi antara satu sama lain. Butiran ini muncul sebagai hasil yang konkrit: sama ada sistem boot secara berulang, sama ada komponen melihat tekanan yang boleh dielakkan, dan sama ada papan kembali ke keadaan yang diketahui selepas kerosakan.
Urutan, permulaan lembut, pembentukan ramp, laluan pelepasan, dan masa antarel yang boleh dikonfigurasi.
Sistem digital secara tipikal tidak hanya meminta voltan keadaan stabil yang betul; ia juga mengharapkan rel tersebut tiba dalam urutan tertentu dan dalam hubungan masa yang terhad. Jika lereng terlalu curam, terlalu perlahan, atau sekadar salah urutan, struktur dan domain dalaman boleh berakhir dalam keadaan tidak ditakrifkan yang sangat tidak menentu, terutamanya sekitar tingkah laku reten SRAM dan bring-up antara muka berkelajuan tinggi.
Struktur ESD dalaman, domain reten SRAM, dan antara muka berkelajuan tinggi.
Apa yang cenderung membentuk hasil dalam reka bentuk sebenar
Apabila sebuah pasukan beralih dari rajah blok kepada prototaip yang berfungsi, pemilihan dan konfigurasi PMIC sering kali berjaya atau gagal berdasarkan butiran operasi dan bukan spesifikasi peringkat pemasaran. Isu-isu halus adalah yang mencipta tekanan jadual, kerana ia muncul lewat dan jarang kali ditunjukkan sebagai sebab akar yang tunggal dan jelas.
Menghadapi transien cepat dan beban dinamik
Pemproses moden dan seksyen RF boleh menuntut langkah arus besar dalam skala masa mikrodetik. Sebuah PMIC boleh kelihatan sangat boleh diterima di atas kertas dan masih menunjukkan droop, overshoot, atau ringing setelah gelung kawalan, pendekatan pampasan, rangkaian output, dan parasitik PCB dipaksa untuk berinteraksi dalam susun atur yang sebenar.
Droop, overshoot, dan ringing.
Pasukan yang menguji respons transien awal seringkali melakukannya kerana mereka telah merasai kesakitan menemui ia lambat. Pengesahan awal boleh mengurangkan kemungkinan kitaran reka bentuk yang tidak selesa melibatkan induktor, kapasitor output, komponen pampasan, atau bahkan pilihan PMIC itu sendiri.
Induktor, kapasitor, komponen pampasan, dan PMIC itu sendiri.
Urutan sebagai kontrak sistem, bukan kemudahan
Urutan kuasa berfungsi terbaik apabila ia dilihat sebagai kontrak merentasi keperluan silikon, andaian firmware, dan tingkah laku papan. Apabila kadar ramp dan masa kuasa baik menyimpang dari apa yang diharapkan oleh lembaran data pemproses, atau apa yang secara tersirat diandaikan oleh firmware, masalah boot yang tidak menentu cenderung muncul.
Keperluan lembaran data pemproses dan jangkaan firmware.
Apa yang menjadikan isu-isu ini sangat mengecewakan adalah kecenderungan mereka untuk hilang dalam keadaan bengkel yang mesra dan kembali semasa suhu ekstrem, sambungan panas bateri, atau keadaan bekalan yang sempit. Dalam persekitaran tersebut, urutan yang deterministik dan tingkah laku reset yang boleh diramal mengurangkan kejutan dan memendekkan kitaran debug.
Sudut suhu, acara sambungan panas bateri, dan keadaan seperti brownout.
Tingkah laku perlindungan sebagai pengungkit masa aktif dan kos perkhidmatan
Had arus lebih, penutupan terma, dan perlindungan UV/OV sering dibincangkan dalam bahasa keselamatan, tetapi produk yang dilaksanakan mengalaminya sebagai ciri ketersediaan. Sebuah PMIC yang mengehadkan arus dengan baik, melaporkan kerosakan dengan cukup jelas untuk diambil tindakan, dan memulihkan dengan cara yang terkawal boleh mengelakkan kegagalan periferal kecil daripada berubah menjadi kegagalan sistem yang penuh dan tiket sokongan.
Mekanisme perlindungan: Perlindungan arus lebih, penutupan terma, perlindungan undervolt, dan perlindungan overvolt.
Manfaat kebolehpercayaan sistem: Penghad batas arus yang baik, pelaporan kerosakan, dan pemulihan terkawal.
Adalah seringkali lebih tepat, dan sebenarnya lebih berguna semasa pengimbangan reka bentuk, untuk memikirkan PMIC sebagai sebahagian daripada seni bina kebolehpercayaan sistem daripada hanya sebagai penukar kuasa. Reka bentuk yang bertahan lama cenderung untuk memilih PMIC berdasarkan sejauh mana ia secara konsisten menguatkuasakan keadaan kuasa yang boleh diramal merentasi operasi normal, pengendalian kerosakan, dan peralihan.
Apabila pandangan itu diambil dengan serius, butiran yang mudah untuk dipandang remeh semasa perancangan awal mula dibaca dengan cara yang berbeza semasa integrasi. Tingkah laku pelepasan rel, integriti isyarat kuasa baik, dan telemetri kerosakan menjadi ciri yang memisahkan peranti yang hanya dihidupkan di makmal daripada peranti yang boot dengan bersih, berulang, dan boleh diramal di lapangan, tanpa meminta pasukan kejuruteraan untuk bernasib baik.
Kategori PMIC
PMIC sering dilabel dengan fungsi utama, namun dalam penghantaran perkakasan, mereka cenderung berfungsi seperti subsistem kuasa yang compact dan terkoordinasi daripada komponen tujuan tunggal. Cara praktikal untuk mengkategorikan jenis PMIC adalah dengan melihat (a) apa yang mereka kawal, (b) apa yang mereka had dan kuatkuasakan, dan (c) apa yang mereka sambungkan, putuskan sambungan, atau aktifkan. Dari perspektif permulaan sistem, garis pemisah yang terus muncul adalah kurang tentang linear versus switching dan lebih tentang sama ada PMIC dibina untuk mengurus interaksi rail-ke-rail di bawah beban yang berubah. Apabila interaksi itu ditangani dengan hati-hati, papan terasa lebih tenang semasa ujian tekanan; apabila tidak, reka bentuk yang sama boleh kelihatan baik pada sumber bench dan menjadi temperamental dalam produk yang sepenuhnya dipasang.
Kumpulan Fungsi Utama
Blok-blok ini menjana rail, menetapkan titik operasi, dan menyerap perubahan dalam keadaan input. Mereka biasanya meliputi segala-galanya dari rail tenang arus rendah hingga domain digital arus tinggi.
• Pengawalan linear (LDOs)
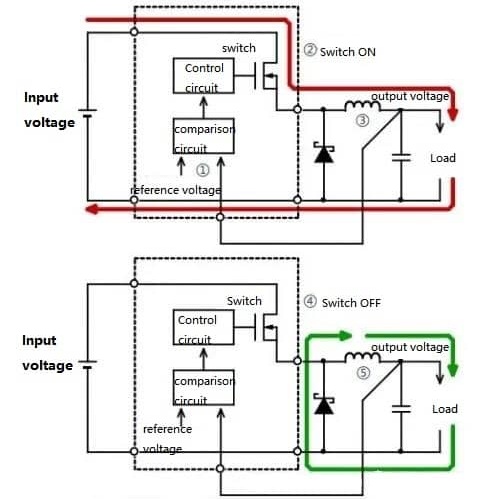
• Pengawalan switching (buck, boost, buck-boost, terbalik, pam caj)
• Penukaran dan pra-pengawalan hadapan (penyesuai AC/DC, tahap sink USB-PD, pra-pengawal automotif pada beberapa platform)
Blok-blok ini membentuk bagaimana kuasa dibenarkan untuk berkelakuan dengan mendefinisikan ambang, memantau sempadan, dan bertindak balas kepada kerosakan. Mereka mungkin tidak menyampaikan watt, tetapi mereka sering memutuskan sama ada sistem gagal dengan bersih atau gagal secara misteri.
• Rujukan voltan dan bandgap
• Penyelia, pemantau, dan pembeza tingkap
• Penjanaan reset, pemasa watchdog, dan pengesanan brownout
• Penjujukan, penjejakan, dan respons kerosakan (UV/OV, arus berlebihan, respons haba)
Blok-blok ini menentukan di mana tenaga mengalir, bila ia diasingkan, dan bagaimana beban luaran dikendalikan. Dalam reka bentuk sebenar, mereka adalah di mana kes-kes tepi, hot-plug, penurunan kabel, dan kerosakan aksesori, cenderung muncul terlebih dahulu.
• Pengurusan laluan kuasa
• Suis beban dan eFuses
• Pengecasan bateri
• Rail dan pemacu berkaitan paparan
• Pemacu pintu MOSFET
Jenis Pengawalan/Penukaran
LDO biasanya dipilih apabila bunyi output rendah, aliran reka bentuk yang mudah, dan tingkah laku isyarat kecil yang cepat adalah diingini. Mereka sering muncul pada blok RF, rail audio, sensor tepat, dan bekalan berkaitan rujukan ADC di mana ayunan boleh menjadi kehilangan prestasi yang boleh diukur.
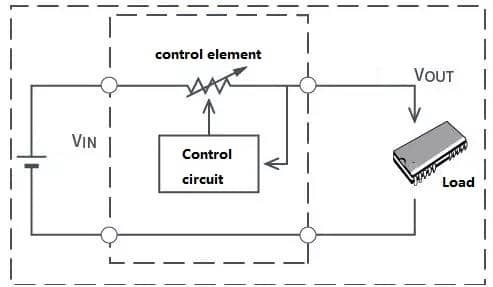
Haba sering menjadi faktor penentu dalam prestasi pengawal. Apabila perbezaan voltan dari input ke output meningkat atau arus beban meningkat, pembebasan kuasa dan suhu boleh menjadi lebih penting daripada spesifikasi ketepatan elektrik.
Rail kuasa yang kelihatan stabil semasa ujian bench terbuka boleh mengalami masalah pemanasan yang ketara di dalam sistem tertutup atau persekitaran suhu tinggi di mana aliran udara dan margin haba berkurangan.
Penukaran buck membawa banyak beban untuk rail teras yang cekap: pemproses aplikasi, DSP, rail DDR, dan domain digital arus tinggi yang lain. Dalam praktiknya, dua papan yang menggunakan buck yang sama boleh berkelakuan sangat berbeza bergantung pada mod kawalan, mod operasi pada beban ringan, dan parasitik yang dipacu oleh susun atur.
• Pendekatan kawalan (mod voltan, mod arus, histeretik, masa hidup tetap)
• Tingkah laku beban ringan (PFM, melangkau denyutan, PWM terpaksa)
• Respons transien versus pertukaran ayunan output
• Postur EMI (pilihan spektrum tersebar, pilihan frekuensi switching, sensitiviti susun atur)
Satu butiran yang cenderung menajamkan ulasan reka bentuk adalah realiti profil beban. Penukaran yang kelihatan cemerlang pada 2 A boleh menghabiskan kebanyakan hayatnya pada 20–200 mA, di mana peralihan mod, kehilangan pengecas pintu, dan overhead switching mendominasi. Membandingkan hanya nilai kecekapan puncak boleh menyebabkan hayat bateri dalam operasi sebenar menjadi lebih teruk daripada yang diharapkan daripada anggaran awal.
Penukaran boost biasanya digunakan apabila rail sasaran mesti melebihi sumber, contoh biasa termasuk menghasilkan 5 V dari bateri sel tunggal, mencipta rail bias paparan, atau memberi makan string LED. Topologi buck-boost digemari apabila input boleh melepasi di atas dan di bawah output yang dikehendaki, seperti mengekalkan rail sistem yang stabil merentasi lengkung pelepasan bateri penuh.
Penukar ini sering menyelesaikan sakit kepala peringkat sistem, seperti mengekalkan domain 5 V stabil semasa bateri merosot, tetapi kelegaan itu datang dengan lebih banyak bahagian bergerak: kompleksiti pampasan, tingkah laku had arus suis, dan EMI yang dikendalikan yang boleh menjadi sensitif terhadap geometri papan dan keadaan kabel.
Dalam telefon dan modul IoT kecil, bata AC/DC biasanya berada di luar produk, namun negosiasi hadapan dan perlindungan input semakin berada di dalam peranti. Walaupun apabila lembaran data memasarkan ini sebagai ciri USB daripada ciri PMIC, mereka membentuk saiz penukar hiliran, pengagihan haba, dan tekanan kes terburuk dengan kuat.
• Sokongan pengesanan dan negosiasi USB-PD
• Pengawalan had semasa input dan kawalan lonjakan
• Perlindungan voltan berlebihan untuk aksesori dan penyesuai USB
Blok Sokongan Ketepatan
Rujukan ketepatan untuk ADC, DAC, dan ambang perbandingan. Dalam produk isyarat campuran, butiran yang berulang kali penting adalah tingkah laku drift, kepadatan bunyi, dan PSRR merentasi julat frekuensi yang berkaitan. Ia boleh terasa tidak intuitif, tetapi sejumlah kecil bunyi rujukan boleh muncul sebagai jitter yang boleh diukur, kesilapan sensor, atau ambiguiti ambang setelah ia didarab dengan pemantapan dunia nyata dan pilihan penapisan.
Penyelia memantau rel untuk voltan rendah, voltan berlebihan, dan pelanggaran urutan. Dalam sistem pelbagai rel, mereka membantu mengelakkan keadaan separuh hidup di mana satu domain muncul dan mula melaksanakan sementara domain lain lambat, kecoklatan, atau berosilasi.
Dari sudut pandang kebolehpercayaan, pemantauan yang kukuh cenderung mengurangkan jenis pulangan lapangan berselang yang menjengkelkan semua orang: masalah yang hanya muncul semasa penghidupan sejuk, pelancaran bateri rendah, acara sambungan cepat, atau kabel sempadan yang tidak pernah berada di “jalan gembira” makmal.
Urutan adalah lebih daripada rel A kemudian rel B. Ia berubah menjadi perbincangan tentang timbunan toleransi masa, cerun rampa, hubungan reset, dan apa yang dilakukan sistem apabila sebuah rel melewatkan tingkapnya.
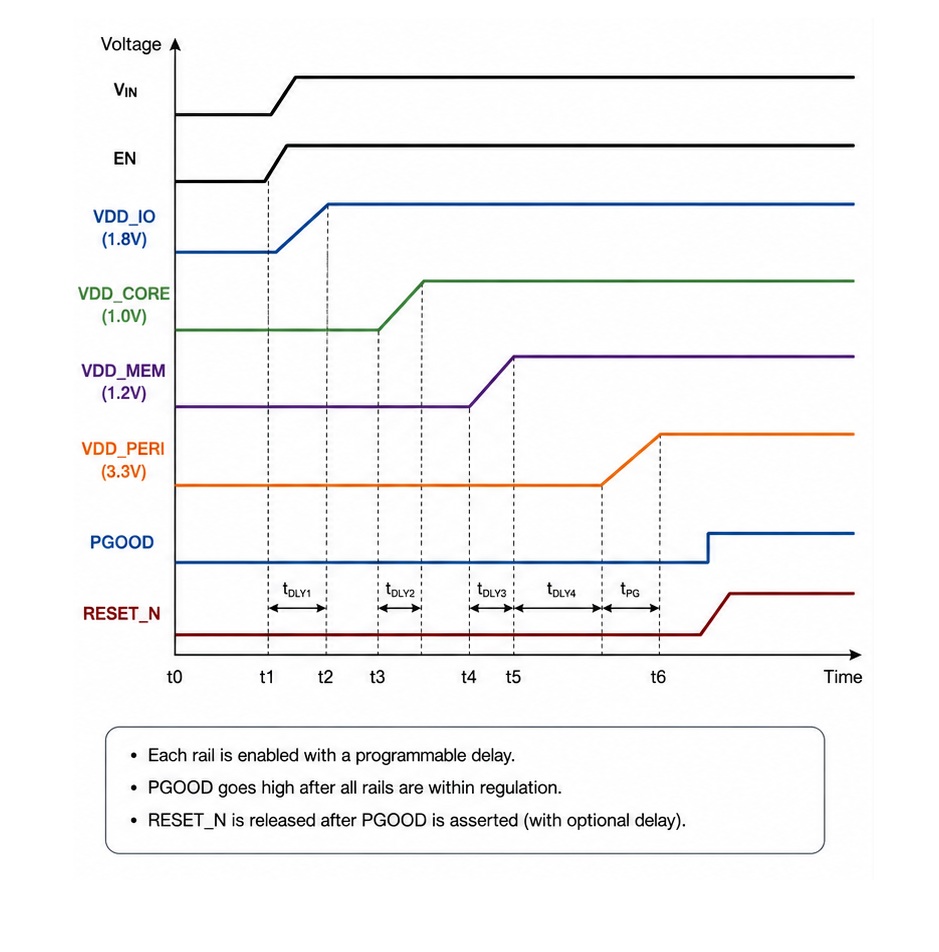
Dokumentasi SoC sering menentukan kebergantungan IO-sebelum-teras, kekangan latihan memori, dan masa penafian reset tepat. PMIC dengan urutan boleh atur dan rampa terkawal boleh mengurangkan logik gam luar dan membuat proses penghidupan terasa kurang seperti kerja tekaan, terutamanya apabila papan beriterasi dengan cepat dan perubahan masa kecil boleh menjimatkan hari penyahpepijatan.
Laluan Kuasa dan Fungsi Pemanduan
Logik laluan kuasa menentukan sama ada sistem beroperasi dari USB, bateri, atau gabungan kedua-duanya, dan ia mempengaruhi apa yang berlaku semasa peralihan.
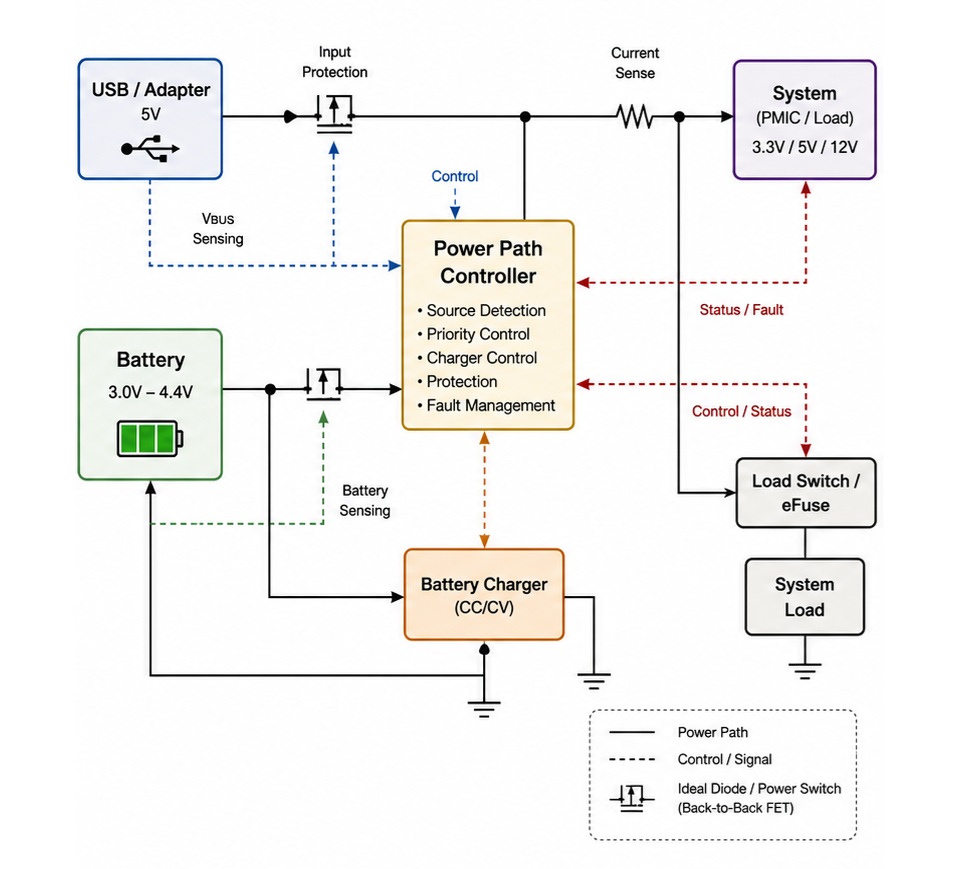
• Kelakuan beralih tanpa gangguan (hadkan penurunan yang mencetuskan reset)
• Had semasa input untuk memadankan penyesuai USB dan kekangan pematuhan
• Kelakuan diod ideal untuk mengurangkan arus terbalik
Perangkap dunia nyata yang berulang adalah meremehkan rintangan dalam kabel, penyambung, dan elemen perlindungan. Semasa transien pantas, PMIC boleh berfungsi tepat seperti yang dirancang dan sistem masih boleh mengalami penurunan kerana laluan hulu lebih rendah daripada yang dianggapkan oleh model. Kegagalan tersebut terasa “tidak adil” sehingga impedans penuh laluan diukur dan dianggap sebagai sebahagian daripada reka bentuk, bukan catatan kaki.
Pengecas berbeza dalam sokongan kimia bateri, topologi litar, ciri termal, dan matlamat reka bentuk. Keutamaan umum termasuk pengecasan lebih pantas, suhu permukaan lebih rendah, EMI dikurangkan, atau mengekalkan prestasi sistem semasa pengecasan.
• Pengecas linear
• Pengecas suis
• Mod bank kuasa/OTG
Pemilihan sering bergantung kepada bajet termal, kekangan peraturan atau interoperability, dan sama ada peranti dijangka mengekalkan prestasi penuh semasa pengecasan tanpa merasa perlahan atau beroperasi dengan suhu yang tidak selesa.
Suis beban biasa digunakan untuk mengawal rel bagi pengurangan kuasa siap sedia dan untuk mengasingkan domain semasa keadaan ralat atau penghantaran. eFuses menambah had semasa boleh atur, pemasa ralat, dan kelakuan hidup yang terkawal.
Dalam banyak produk, blok ini membayar kembali kawasan papan mereka dengan menukar mod kegagalan yang tidak teratur, pintasan penyambung, kesilapan aksesori, acara salah sambung, ke dalam insiden terkurung daripada reset berturutan atau kerosakan fizikal yang mahal untuk didiagnosis dan lebih sukar untuk direproduksi.
Sistem paparan sering memerlukan pelbagai rel kuasa seperti AVDD, VGH, dan VGL dengan urutan penghidupan yang dikawal dengan teliti untuk mengelakkan artefak paparan yang dapat dilihat. Pemacu LED juga mesti mengawal arus dengan tepat dan bertindak balas dengan boleh dipercayai kepada ralat terbuka dan litar pintas kerana keadaan ini sering berlaku semasa operasi.
Pemandu gerbang dan peringkat kuasa tinggi menjadi semakin relevan dalam robotik, automotif, dan peralatan industri, di mana kawalan motor dan penukaran voltan tinggi bersilangan dengan koordinasi gaya PMIC, telemetri, dan polisi perlindungan.
PMIC “Telefon/IoT” Tipikal
Dalam banyak telefon dan modul IoT padat, PMIC paling baik difahami sebagai campuran sengaja blok-blok daripada satu kategori tunggal. Integrasi biasanya bertujuan untuk mengurangkan kawasan PCB, memudahkan urutan, dan memberikan firmware satu tempat untuk memerhatikan dan mempengaruhi tingkah laku kuasa.
• Beberapa penukar buck kecekapan tinggi untuk CPU, GPU, memori, dan rel sentiasa aktif
• Satu atau lebih LDO untuk rel analog dan RF rendah bunyi
• Litar pengecas dan laluan kuasa untuk penyelarasan USB dan bateri
• Pemantau, penyusun, kawalan termal, dan laporan gangguan untuk telemetri dan pengendalian ralat
Apa yang cenderung mendominasi hasil adalah interaksi rel. Transien buck boleh dipadankan ke dalam RF LDO melalui impedans tanah bersama. Penurunan suhu pengecas boleh menurunkan arus sistem yang tersedia secara senyap, dan perubahan itu boleh menarik rel inti ke dalam kejatuhan semasa lonjakan beban kerja. Reka bentuk yang menilai setiap blok secara terasing sering kelihatan bersih dalam ujian bangku awal dan kemudian menjadi pelik semasa ujian tekanan bersepadu, apabila segala-galanya bertukar, memanaskan, dan berunding secara serentak.
Pemilihan dan Integrasi
Pengawal pertukaran biasanya dipilih untuk mengurangkan penghabisan, namun mereka boleh memperkenalkan riak dan EMI yang merebak ke dalam domain sensitif. LDO sering menenangkan bunyi, tetapi kosnya muncul sebagai haba apabila ruang voltan adalah banyak atau arus tidak trivial.
• Pengawal pertukaran: kecekapan lebih tinggi, lebih banyak kerja pengurusan riak/EMI
• LDO: bunyi lebih rendah, penghabisan haba lebih tinggi apabila menurunkan voltan
Satu kompromi yang sering berfungsi dengan baik adalah dengan menggunakan buck untuk mencipta rel sementara, kemudian menggunakan LDO untuk rel sensitif akhir, selagi ruang dan tingkah laku terma dirancang dengan sengaja dan bukannya ditinggalkan selepas keputusan lain.
Perubahan beban yang cepat memerlukan gelung kawalan yang cepat, reka bentuk pampasan yang betul, dan kapasitans output yang mencukupi untuk mengekalkan pengawalan yang stabil semasa mikrodetik pertama respons. Pemilihan kapasitor melibatkan lebih daripada sekadar meningkatkan kapasitans. Kapasitans yang berkesan boleh berkurangan disebabkan bias DC, perubahan suhu, dan penuaan. ESR dan ESL juga mempengaruhi kestabilan litar, respons transien, dan prestasi EMI, menjadikannya pertimbangan reka bentuk yang penting.
Pasukan yang mengesahkan dengan dielektrik kapasitor tepat, penarafan voltan, dan saiz kes yang dimaksudkan untuk pengeluaran cenderung mengelak kejutan kestabilan di peringkat akhir, terutamanya apabila rantaian bekalan memaksa penggantian setara yang hanya setara di atas kertas.
Tingkah laku PMIC di bawah kecacatan boleh direka berdasarkan falsafah yang berbeza. Satu pendekatan mencuba penurunan yang indah, pengendalian brownout, petunjuk pelambatan kepada pemproses, pemotongan rel selektif, supaya sistem tetap boleh digunakan dalam mod yang diperkecil. Pendekatan lain sangat menegaskan penutupan deterministik untuk mencapai keadaan selamat yang diketahui dengan cepat.
• Penurunan yang indah: sering selaras dengan matlamat pengalaman pengguna dalam produk pengguna
• Penutupan deterministik: sering selaras dengan tingkah laku boleh diramal dalam reka bentuk yang memberi tumpuan kepada keselamatan
PMIC yang paling sesuai biasanya adalah yang urutan dan respons kecacatannya sepadan dengan tingkah laku yang dimaksudkan produk, bukan yang kebetulan mengiklankan senarai semak yang paling panjang.
Frekuensi pertukaran yang lebih tinggi dan tahap kuasa jalur lebar semakin meningkatkan ketumpatan kuasa yang boleh dicapai, tetapi mereka juga mencipta keperluan susun atur PCB yang lebih ketat dan sensitiviti EMI yang lebih besar. Pada masa yang sama, ciri perisian seperti telemetri, gangguan, fungsi pengekalan, dan dasar kawalan boleh program sedang menjadi faktor penting dalam pengurusan dan integrasi sistem kuasa secara keseluruhan.
PMIC yang mengekalkan tingkah laku kuasa yang boleh diramal di bawah beban kerja nyata boleh mengurangkan masa pengesanan dengan ketara, terutamanya dalam sistem yang mengurus radio, pemproses, operasi pengecasan, dan had terma secara serentak.
Skop Aplikasi PMIC
PMIC muncul di mana sahaja tenaga elektrik perlu ditukar, diedarkan, diurutan, diperhatikan, dan dijaga sambil mengekalkan kerugian dan gangguan di bawah kawalan. Mereka secara rutin digunakan di seluruh reka bentuk pengguna, perusahaan, automotif, dan industri, namun garis pemisah biasanya bukan pasaran akhir, tetapi bagaimana pokok kuasa kelihatan dalam praktik. Saat produk mengandungi beberapa rel dengan toleransi bunyi yang berbeza, tingkah laku beban langkah yang berbeza, dan jangkaan kecacatan yang berbeza, PMIC berhenti merasa seperti "pilihan bahagian" dan mula bertindak sebagai kekuatan yang membentuk tingkah laku sistem. Dalam banyak reka bentuk nyata, setelah pemproses berprestasi tinggi digandingkan dengan radio, sensor, memori, dan I/O berkelajuan tinggi, seni bina kuasa akhirnya mengehadkan apa yang platform boleh sampaikan secara konsisten, walaupun pengkomputeran dan perisian kelihatan solid di atas kertas.
Di Mana Tingkah Laku PMIC Menghadkan Hasil Sistem Dunia Nyata
Respons Transien Beban Yang Menyediakan Siling Secara Senyap
CPU dan GPU moden menarik langkah arus yang tiba-tiba semasa aktiviti penguat dan letupan, dan langkah-langkah tersebut boleh menjadi sangat tidak memaafkan. Apabila gelung kawalan PMIC, kapasitans output, dan impedans pengedaran tidak dapat mengekalkan rel di dalam batas yang ketat, pasukan perisian sering bertindak balas dengan cara yang halus tetapi mahal: mereka memendekkan tingkap penguat, mengurangkan jam puncak, atau memasukkan jalur penjaga yang lebih lebar supaya keruntuhan tidak muncul di lapangan. Dari sudut pandang kejuruteraan, perdagangan itu boleh terasa mengecewakan kerana platform mungkin kelihatan cekap tetapi masih membiarkan prestasi di atas meja di bawah trafik yang realistik.
Pasukan yang hanya mengesahkan dengan beban statik atau corak makmal yang teratur cenderung belajar ini lewat. Beban kerja sebenar mencipta tepi bergerigi: penggalakan permainan yang pendek, lonjakan inferens AI, dan acara koeksistensi radio boleh menghasilkan penurunan voltan yang tidak pernah muncul apabila rel diuji dengan profil bangku yang baik. Pengajaran yang tidak selesa adalah bahawa tingkah laku transien yang boleh diulang di bawah beban kerja yang tidak teratur sering membeli prestasi yang lebih boleh digunakan daripada mengejar nombor kecekapan yang memikat pada satu titik operasi tunggal.
Riak dan Bunyi Jalur Lebar yang Menjadi Hutang Integriti Isyarat
Riak tidak seharusnya diperlakukan hanya sebagai parameter prestasi analog. Harmonik penghidup dan bunyi jalur lebar boleh mempengaruhi resolusi ADC, meningkatkan bunyi fasa RF, dan mengurangkan marginals isyarat SERDES, terutamanya apabila rel kuasa berkongsi laluan kembali atau bercouple melalui induktansi pakej dan PCB. Sebuah rel kuasa yang kelihatan bersih dalam ujian rel tunggal boleh berkelakuan sangat berbeza di dekat antara muka berkelajuan tinggi, antena, atau seksyen memori padat.
Realiti susun atur juga mengubah cerita. Sekatan mekanikal dan kawasan larangan memaksa kompromi, dan kompromi tersebut boleh memperbesar laluan penggabungan yang tidak dapat dilihat dalam susun atur ideal. Dalam amalan, penyelesaian kuasa memperoleh kepercayaan apabila ia kekal stabil dan senyap di bawah penempatan yang tidak sempurna dan pemilihan tidak ideal, bukan hanya apabila ia diukur dalam konfigurasi demo kes terbaik.
Mula dan Urutan yang Membentuk Hasil Kebolehpercayaan
Urutan penghidupan dan tingkah laku ramp menentukan sama ada latihan memori selesai dengan konsisten, radio dikalibrasi tanpa kegagalan sudut yang pelik, dan domain sentiasa aktif kekal stabil melalui pemadaman. Urutan marginal sering menghasilkan corak kegagalan yang menguras masa dan moral: “satu dalam lima puluh but,” sukar diulang, dan lebih sukar untuk diselesaikan setelah sistem sepenuhnya diintegrasikan.
Urutan cenderung berfungsi lebih baik apabila ditangani sebagai sebahagian daripada tingkah laku reset dan pemulihan dan bukannya senarai semak lewat. Reka bentuk yang bertahan dalam pengeluaran biasanya memperlakukan keseluruhan laluan penghidupan/pemadaman sebagai mesin negeri yang boleh diulang, kemudian membuktikannya di bawah kadar ramp kes terburuk, suhu sejuk, dan keadaan bateri rendah. Pengitaran kuasa automatik sering menjadi tempat di mana keyakinan diperoleh, kerana ia mendedahkan tepi selang yang tidak dapat ditunjukkan oleh beberapa togol kuasa manual.
Kriteria Pemilihan sebagai Ruang Perdagangan Sistem
Kecekapan Dinilai Merentasi Mod, Bukan sebagai Nombor Trofi
Kecekapan berubah makna bergantung pada bagaimana produk sebenarnya menghabiskan masanya. Kecekapan beban puncak mungkin kelihatan mengagumkan dalam spesifikasi, tetapi jangka hayat bateri sebenar dan prestasi termal bergantung kepada banyak syarat operasi, termasuk pemprosesan lonjakan, beban normal, beban ringan, dan operasi tidur mendalam. Kerugian penghidupan, kerugian konduksi, dan arus tenang bersaing secara berbeza dalam setiap kawasan, dan “pemenang” beralih dengan profil beban kerja.
Untuk reka bentuk berkuasa bateri, Iq rendah dan kecekapan beban ringan yang kuat sering ditunjukkan secara langsung sebagai masa yang lebih lama antara pengecasan, yang mana pasukan produk cenderung mengambil berat dengan cara yang sangat konkrit. Untuk pelayan dan peralatan rangkaian, kerugian konduksi dan sekatan termal biasanya mendominasi kerana arus berterusan dan pengeluaran haba menjadi realiti harian. Cara yang beralasan untuk memutuskan adalah dengan memetakan sasaran kecekapan kepada taburan masa beban kerja, dan bukannya mengoptimumkan satu titik operasi yang hampir tidak pernah berlaku di lapangan.
Ruang Termal yang Menjaga Prestasi daripada Runtuh Di Bawah Haba
Had termal sering menentukan arus maksimum yang boleh disokong, yang pada gilirannya menentukan pengiraan maksimum yang disokong. Sebuah PMIC boleh kelihatan elektrik cemerlang dan masih gagal memenuhi matlamat sistem jika pakej, tembaga, dan penempatannya mencipta hotspot lokal dekat memori, tin perisai, atau blok RF yang sensitif kepada suhu. Dalam pemasangan sebenar, peningkatan suhu kecil boleh mencetuskan tingkah laku pengurangan, ambang perlindungan, atau kebimbangan kebolehpercayaan jangka panjang yang tiada siapa ingin jelaskan selepas pelancaran.
Reka bentuk yang berumur baik biasanya merancang untuk slack termal. Perancangan itu sering muncul sebagai ciri termal pakej yang sepadan dengan beban, kemampuan berbilang fasa apabila profil arus membenarkannya, dan strategi susun atur yang menyebarkan haba sambil mengekalkan gelung arus cukup pendek untuk mengelakkan menjadikan penyelesaian termal menjadi masalah bunyi.
Sekatan EMI yang Membesarkan Kos Jadual dan Iterasi
Frekuensi penghidupan, kadar tepi, dan topologi kawalan sangat mempengaruhi sama ada EMI boleh diurus dengan penapisan yang mudah atau menjadi kitaran putaran papan dan sesi makmal larut malam. Pematuhan lembaran data hanyalah sebahagian daripada cerita; kepekaan susun atur boleh mendominasi hasil. Penyelesaian yang menuntut geometri gelung hampir sempurna boleh menjadi pertaruhan apabila sekatan mekanikal memaksa penempatan yang tidak menarik.
Banyak pasukan akhir lebih memilih penyelesaian yang sedikit lebih perlahan dan lebih boleh dikawal, satu dengan kadar perubahan yang boleh diurus dan tingkah laku spektrum yang boleh diramal, kerana ia mengurangkan masa penyahpepijatan dan menurunkan risiko pengesahan. Pilihan itu mungkin terasa konservatif, tetapi ia sering selaras dengan realiti bahawa masalah EMI cenderung tiba lewat, apabila jadual tidak memberi kemaafan.
Ciri Perlindungan Yang Menentukan Pengalaman Kerosakan dan Tingkah Laku Perkhidmatan
Tingkah laku perlindungan memberi kesan ketara kepada respons sistem semasa keadaan kerosakan. Tetapan OCP, OVP, OTP, dan perlindungan litar pendek boleh menentukan sama ada sistem melakukan penutupan bersih, memasuki mod latch-off, atau memulakan semula secara berulang dengan tingkah laku yang tidak stabil. Respons ini secara langsung mempengaruhi tahap kesukaran penyelesaian masalah, keperluan sokongan, dan persepsi keseluruhan terhadap kebolehpercayaan produk.
Tetapan perlindungan juga berinteraksi dengan acara operasi normal. Had arus yang agresif boleh mengurangkan risiko kerosakan, namun ia juga boleh mencetuskan pengulangan semula semasa momen lonjakan arus atau lonjakan permulaan. Pengendalian kerosakan biasanya berfungsi dengan terbaik apabila ia diselaraskan sebagai sebahagian daripada strategi perkhidmatan yang dimaksudkan, memutuskan apa yang harus mencuba semula, apa yang harus latch, apa yang harus log, dan apa yang harus gagal dengan cepat, berbanding dibiarkan sebagai nilai pendaftar lalai.
Kos Pengintegrasian Yang Termasuk Firmware, Pengesahan, dan Realiti Penyahpepijatan
Kos pengintegrasian jarang berhenti di BOM dan kawasan PCB. Ia termasuk kerja firmware, skop pengesahan, masa ujian, ketahanan pembuatan, dan beban penyahpepijatan apabila sesuatu tidak berfungsi seperti yang diharapkan. PMIC yang sangat terintegrasi boleh mengurangkan jumlah komponen, yang menarik, tetapi ia juga menumpukan risiko: penyesuaian lewat pada satu rel boleh mencetuskan penaik taraf semula bahagian lebih besar dari pokok kuasa daripada yang dirancang oleh pasukan.
Pendekatan yang lebih diskret boleh meningkatkan usaha susun atur dan pengurusan bahagian, tetapi mereka mungkin menawarkan modulariti dan penggantian yang lebih mudah jika keadaan rantaian bekalan berubah atau kemas kini pertengahan hayat dijangka. Lensa pemilihan yang lebih jujur adalah selera risiko program: kepekaan jadual, jumlah iterasi yang diharapkan, dan seberapa kerap reka bentuk mungkin akan disemak semula selepas pelepasan pertama.
Ciri Kuasa Digital: Fleksibiliti Yang Datang Dengan Syarat Terlampir
Telemetri, rel yang boleh diprogramkan, dan pengukuran voltan dinamik boleh membawa kelebihan nyata: pengoptimuman kuasa yang lebih ketat, diagnostik kerosakan yang lebih jelas, dan pengukuran prestasi adaptif yang mengikuti beban kerja dan suhu. Pada waktu yang sama, ciri-ciri ini menarik dalam kebergantungan firmware, kawalan konfigurasi, disiplin pengaturcaraan pengeluaran, dan mod kegagalan baru yang sama sekali tidak wujud dalam konfigurasi analog yang lebih sederhana. Telemetri menjadi berharga hanya apabila data yang dikumpulkan digunakan secara aktif untuk pemantauan dan keputusan reka bentuk dan bukan dibiarkan tidak digunakan dalam papan pemuka diagnostik.
Dari segi praktikal, kuasa digital memperoleh nilainya apabila ia menutup gelung yang boleh diukur. Jika kebolehan pemprograman boleh digunakan untuk memulihkan hasil, memanjangkan hayat bateri, atau mencegah penurunan suhu dengan polisi terkawal, ia menjadi penggerak yang kuat. Jika ia diaktifkan semata-mata kerana ia tersedia, ia sering bertukar menjadi permukaan konfigurasi yang tidak digunakan yang menyulitkan pengesahan, meningkatkan risiko salah konfigurasi pembuatan, dan mencipta kekaburan tentang apa tetapan yang benar-benar dimaksudkan.
Aliran Pemilihan dan Pengesahan Praktikal Yang Mengikuti Tingkah Laku Sistem
Aliran kerja yang cenderung bertahan di bawah tekanan bermula dari sasaran tingkah laku sistem daripada menyemak katalog PMIC dan berharap pemadanan berfungsi nanti. Ia memecahkan masalah kepada bahagian yang konkrit dan boleh diuji dan memaksa kejelasan tentang apa yang dimaksudkan dengan tingkah laku yang baik sebelum papan dihidupkan.
• Tukarkan transien beban kerja kepada keperluan rel (penurunan yang dibenarkan, masa penetapan, arus puncak, kadar pengulangan).
• Definisikan belanjawan bunyi untuk blok sensitif (ADC, PLL, SERDES, RF) dan peta mereka kepada had gelombang dan andaian susun atur.
• Spesifikasikan penyusunan, kebergantungan reset, dan pemulihan brownout sebagai satu mesin keadaan.
• Nilai risiko EMI lebih awal menggunakan sekatan penempatan yang realistik dan pendekatan perlindungan yang dimaksudkan.
• Sahkan tingkah laku perlindungan dengan suntikan kerosakan yang menyerupai litar pendek sebenar, acara kabel, dan penurunan bateri.
ADC / PLL / SERDES / RF
Gaya pendekatan ini mengurangkan kejutan di peringkat akhir kerana ia menganggap PMIC sebagai mekanisme yang mengawal tingkah laku kuasa di peringkat sistem, bukan sebagai utiliti latar belakang. Apabila kuasa direka sebagai subsistem kelas pertama, prestasi menjadi lebih konsisten, kebolehpercayaan menjadi lebih mudah untuk dipertahankan dengan data, dan kerja pematuhan cenderung lebih dapat diramal, sementara pasukan menghabiskan lebih sedikit masa mengejar kegagalan sesekali yang berasal dari rel berbanding dari logik atau perisian.
Arah Masa Depan untuk PMICs
Densiti kuasa yang lebih tinggi dan voltan teras yang lebih rendah memaksa PMIC mengawal dengan ruang elektrik yang lebih ketat dan toleransi yang kurang untuk kelewatan. Apabila rel bekalan berada lebih dekat dengan titik operasi minimum beban digital, walaupun penurunan sederhana boleh muncul sebagai kesilapan lembut, resett, atau pengurangan prestasi yang terasa “misteri” semasa pengaktifan sistem. Ini secara beransur-ansur mengalihkan perhatian reka bentuk daripada sejauh mana tepatnya rel kelihatan dalam keadaan pegun dan ke arah bagaimana ia berfungsi semasa senario beban yang terburuk dan berubah dengan pantas.
Pasukan sering menghadapi realiti yang tidak selesa: satu gelung yang kelihatan tenang di meja ujian boleh tetap berkelakuan tidak baik dalam produk apabila beban sebenar mencipta langkah beban yang tajam, titik panas tempatan, dan pembahagian arus fasa yang tidak sekata. Pola yang lebih tahan adalah untuk menganggap reka bentuk gelung, pilihan peringkat kuasa, dan impedans PDN sebagai satu sistem yang dipasangkan, kemudian mengesahkan tingkah laku menggunakan tandatangan beban yang representatif dan bukannya denyutan yang bersih dan ideal.
Transien yang lebih cepat secara semulajadi menarik reka bentuk ke arah gelung yang lebih ketat, namun gelung yang lebih ketat juga menjadikan reka bentuk lebih terdedah kepada induktans parasitik, pengumpulan toleransi, dan bunyi pengesan yang mudah diabaikan pada awalnya. Dalam banyak program, perbezaan antara stabil dan stabil di lapangan datang daripada pemodelan isyarat kecil yang dipertingkatkan, pengesanan arus yang boleh dipercayai, dan pampasan yang diselaraskan dengan kesedaran tentang susun atur sebenar.
Meningkatkan kekerapan switching boleh membantu, tetapi ia tidak secara automatik diterjemahkan kepada tingkah laku transien yang lebih baik jika laluan pengesanan dan geometri PCB tidak dapat menyokong lebar jalur tambahan. Apabila ketidakpadanan itu berlaku, keuntungan gelung dibelanjakan untuk memperkuatkan bunyi, yang boleh muncul sebagai switching bergetar, artefak yang dapat didengar dalam keadaan operasi tertentu, atau puncak EMI yang hanya muncul selepas integrasi mekanikal.
Blok pengiraan dan konektiviti moden menghasilkan permintaan yang berkelip-kelip dan komposisi, jadi pengesahan transien semakin mencerminkan apa yang sebenarnya dilakukan oleh perisian dan radio dan bukannya apa yang boleh didekati oleh kotak beban dengan satu langkah.
Banyak pasukan menggabungkan aliran kerja yang menggabungkan:
• Langkah beban makmal
• Log telemetri platform
• Kemas kini berulang untuk pilihan pampasan dan pengasingan.
Pendekatan ini cenderung untuk mengurangkan kejutan pada peringkat akhir, terutama apabila had thermal perlahan-lahan membentuk semula tingkah laku elektrik dan mengalihkan margin dari semasa ke semasa.
Tekanan untuk mengurangkan saiz sambil meningkatkan prestasi sedang memperluaskan integrasi ke dalam pakej dan struktur sekitarnya, bukan hanya cip. Pembungkusan lanjutan dan pasif terbenam boleh memendekkan gelung tinggi-di/dt, mengurangkan parasit, dan mengetatkan respons transien dengan cara yang terasa boleh diukur dengan segera semasa debug. Magnet terintegrasi boleh meningkatkan densiti kuasa, tetapi manfaatnya sering terhad oleh laluan termal, sekatan mekanikal, dan bagaimana pengikatan berubah setelah reka bentuk berada di dalam penutupnya yang sebenar.
Dalam produk yang dilaksanakan, keuntungan yang paling tahan dari integrasi sering datang daripada mengurangkan sensitiviti kepada variasi pembinaan dan menstabilkan prestasi merentasi penyebaran pembuatan, bukannya hanya memotong bil bahan.
Pemilihan pakej semakin mencerminkan hasil elektrik dan termal, termasuk induktans gelung yang lebih rendah, penyebaran haba yang diperbaiki, dan kawalan impedans yang lebih boleh diramal. Satu pengajaran lapangan yang biasa adalah bahawa dua papan yang berkongsi skematik yang sama boleh berbeza dengan tajam dalam tingkah laku apabila satu reka bentuk mengekalkan gelung arus yang padat dan yang lain menyebarkan laluan kuasa di seluruh PCB.
Apabila integrasi sistem meningkat, perancangan susun atur sering diutamakan lebih awal dalam pembangunan kerana perubahan komponen kemudian tidak sentiasa dapat membetulkan masalah yang disebabkan oleh geometri atau laluan PCB yang buruk.
Magnet terintegrasi boleh meningkatkan kecekapan pada frekuensi yang lebih tinggi dan mengurangkan ketinggian z, yang menarik dalam produk yang dikemas ketat. Pada masa yang sama, mereka boleh memperkenalkan laluan pengikatan baru dan mencipta titik panas termal yang sukar dikesan sehingga prototaip akhir. Reka bentuk yang berjalan lancar biasanya menganggap induktor dan pakej sebagai topik reka bentuk bersama EMI-dan-termal, termasuk keputusan penempatan berhampiran antena, pautan kelajuan tinggi, dan sensor sensitif.
Amalan EMI semakin menjauhi mitigasi yang murni statik dan menuju strategi kawalan yang meramalkan keadaan operasi. Teknik seperti modulasi spektrum tersebar, pemanduan gerbang yang lebih pintar, dan pengesanan pada cip yang lebih kaya dapat mengurangkan puncak, tetapi ia juga memerlukan penyelarasan untuk mengelakkan sekadar bertukar puncak emisi dengan bunyi lebar jalur atau gangguan radio.
Banyak pasukan telah melihat urutan itu berlaku: pemeriksaan EMI awal lulus, kemudian binaan kemudian gagal apabila pelbagai pengawal beralih dalam corak berkait, apabila jadual firmware baru mengubah masa beban, atau apabila kabel dan pelindung mengubah laluan pulangan. Pengalaman ini mendorong pemikiran EMI naik ke tahap platform dan bukannya menganggap setiap pengawal sebagai kotak terasing.
Apabila suis tepi menjadi lebih pantas, kawalan dv/dt semakin mempengaruhi kedua-dua emisi dan tekanan jangka panjang. Pemacu pintu semakin menambah kebolehan pengaturcaraan, dan logik perlindungan menjadi lebih peka terhadap konteks, yang boleh membuat penyetelan terasa lebih seperti kejuruteraan sistem berbanding pemilihan komponen.
Satu tabiat praktikal yang menjimatkan masa adalah untuk menyetel kadar tepi menggunakan pengukuran yang diambil dalam konfigurasi mekanikal final, kerana perisai, jangkar, dan struktur tanah sering mengubah hasil EMI dengan cara yang tidak ditunjukkan oleh papan kosong.
Peningkatan pengesanan dalam cip membolehkan tingkah laku adaptif seperti mengubah tingkah laku suis apabila emisi mendekati had atau apabila mod operasi berubah. Dari semasa ke semasa, ini mendorong PMICs menjauhi tingkah laku fungsi tetap dan ke arah subsistem yang diurus yang secara berterusan merundingkan prestasi, bunyi, dan keadaan termal berdasarkan maklum balas dan bukannya anggapan.
Sistem yang menggunakan bateri terus mengejar arus qiescent ultra-rendah dan kecekapan beban ringan yang kuat dengan menggunakan teknik seperti operasi PFM/burst, emulasi diod, dan pemilihan mod automatik. Ketegangan emosi yang diakui oleh banyak pasukan adalah bahawa mod beban ringan yang sama yang kelihatan hebat pada lembaran data boleh memperkenalkan riak, artefak audibel, atau tanda EMI berselang yang dapat diperhatikan serta-merta walaupun kecekapan purata kelihatan cemerlang.
Untuk mengurangkan kekeliruan, pasukan semakin mendefinisikan apa yang maksud tingkah laku siap sedia yang boleh diterima dalam istilah konkrit, kemudian memilih strategi mod untuk disesuaikan.
Sasaran yang biasanya ditentukan termasuk:
• Had riak dalam tidur/siap sedia
• Kelewatan bangun
• Sekatan akustik/bunyi
• Tingkah laku EMI semasa aktiviti pengurusan berkala.
Dalam praktiknya, hayat bateri di bawah kitaran tugas yang realistik sering menceritakan kisah dengan lebih dipercayai daripada angka kecekapan puncak, terutamanya apabila kitaran tugas termasuk tidur, bangun berkala, letupan radio, dan pengambilan sensor.
Pengalihan mod automatik adalah menarik, tetapi peralihan boleh mencipta gangguan pendek yang hilang dalam pengukuran purata dan hanya muncul sebagai reset jarang atau aduan bunyi berselang. Reka bentuk yang terasa "kukuh" di lapangan cenderung menghabiskan usaha pengesahan tambahan tepat di batas antara PFM dan PWM, termasuk urutan bangun, kelewatan urutan, dan langkah beban keadaan batas.
Pola yang berulang adalah bahawa tetapan kecekapan yang paling agresif tidak selalu menjadi pilihan produk yang paling selesa apabila ia menghasilkan riak yang berbeza dengan keadaan atau penggabungan bunyi yang sukar untuk diulang. Banyak pasukan akhirnya memilih konfigurasi yang mengorbankan sedikit kecekapan sebagai ganti tingkah laku yang dapat diulang merentasi suhu, variasi binaan, dan senario, yang sering mengurangkan risiko integrasi dan mengurangkan churn sokongan.
Apabila platform pengiraan meningkat, mereka semakin bergantung pada telemetri yang tepat, pengimbangan voltan yang adaptif, dan perlindungan yang diselaraskan merentasi banyak rel. Telemetri memainkan peranan praktikal dalam kejuruteraan sehari-hari: ia boleh memendekkan proses penaikan, mempercepat analisis punca akar, dan mengurangkan godaan untuk merancang berlebihan "hanya untuk kes" dengan mendedahkan di mana margin sebenarnya berada.
Telemetri cenderung menjadi lebih penting apabila keadaan berubah dengan cepat, tidak apabila rel stabil dan mudah diukur. PMIC yang akan datang dijangka akan meningkatkan tingkah laku pengambilan sampel, pilihan penapisan, dan penyelarasan masa supaya keputusan perisian lebih dekat dengan realiti.
Satu nuansa yang cenderung dihargai oleh pasukan yang berpengalaman adalah bahawa lebih banyak sampel tidak secara automatik lebih berguna; konsistensi, kestabilan kalibrasi merentasi suhu, dan definisi yang jelas tentang lebar jalur dan kelewatan sering menentukan sama ada data boleh diambil tindakan dengan yakin.
Dengan lebih banyak rel datang keperluan yang lebih kuat untuk tingkah laku perlindungan yang terkoordinasi supaya sistem bertindak balas dengan koheren bukannya rel demi rel.
Penyelarasan perlindungan sering merangkumi:
• Tingkah laku respons OCP
• Tingkah laku respons OVP
• Tingkah laku respons UVP
• Tingkah laku respons OTP
• Kebergantungan urutan
• Dasar pemulihan ralat
• Perkongsian status merentasi PMIC
Sistem nyata sering gagal bukan kerana ciri hilang, tetapi kerana rel bertindak balas dengan cara yang berbeza terhadap kejadian yang sama, menghasilkan ribut brownout atau gelung reboot yang sukar untuk dianalisis. Pendekatan penanganan ralat yang terkoordinasi, status yang dikongsi serta pelan pemulihan yang bersatu, lebih baik mencocokkan bagaimana platform dijangka bertindak di bawah tekanan.
Penerimaan GaN dan SiC akan berkembang di kawasan di mana frekuensi penukaran dan kecekapan secara material mengubah saiz atau prestasi. Penukaran yang lebih pantas dapat mengecilkan komponen magnetik dan mempertajam respons transien, tetapi ia juga meningkatkan tekanan berkaitan dv/dt, sensitiviti EMI, dan tuntutan terhadap reka bentuk pemacu pintu dan strategi pengasingan. Sekatan ini tidak hanya bersifat elektrik; ia juga melibatkan sempadan operasi yang melibatkan variasi pengeluaran dan senario penyalahgunaan dunia sebenar yang telah dipelajari oleh pasukan untuk diambil serius.
Penyelesaian GaN dan SiC cenderung untuk menghargai kawalan pemacu pintu yang tepat, susun atur yang berdisiplin, dan skema perlindungan yang mengelakkan overshoot, ringing, dan penghidupan yang tidak disengajakan. Satu wawasan praktikal yang muncul berulang kali adalah bahawa kualiti susun atur boleh mendominasi pemilihan peranti; susun atur yang dilaksanakan dengan baik dengan peranti "modest" boleh mengatasi peranti premium yang diletakkan dalam gelung induktif yang bising.
Apabila kelajuan penukaran meningkat, pilihan pengasingan dan had ketahanan jangka panjang menjadi lebih ketara dalam tinjauan reka bentuk dan perancangan kelayakan. Penerimaan biasanya mempercepat di mana peningkatan prestasi jelas membenarkan ketegasan reka bentuk yang ditambah, sementara produk yang sensitif terhadap kos atau bunyi sering bergerak dengan lebih berhati-hati dan menuntut bukti yang lebih jelas mengenai faedah tahap sistem.
PMIC semakin dibentuk untuk berfungsi seperti pelaksana dasar yang mengatur kecekapan, bunyi, suhu, dan ketahanan secara masa nyata. Senibina yang cenderung untuk bertahan lama memperlakukan kuasa sebagai sumber yang diurus: telemetri PMIC memberitahu dasar perisian, dan dasar perisian seterusnya menyesuaikan mod operasi PMIC dan tingkah laku rel. Ini mengaburkan garis pemilikan antara perkakasan dan perisian dalam cara yang mungkin terasa tidak selesa pada awalnya, tetapi ia sering membuahkan hasil dengan mengurangkan pengumpulan margin dan meningkatkan ketahanan di bawah beban kerja sebenar.
Kesimpulan
Perlindungan litar yang berkesan bergantung kepada lebih daripada menambah satu bahagian pelindung. Reka bentuk yang boleh dipercayai memerlukan koordinasi yang betul antara pengalihan lonjakan, penapisan voltan, had arus, pembumian, susun atur, dan masa kerosakan. Setiap peranti perlindungan mempunyai kekuatan dan hadnya sendiri, jadi pemilihan mesti sepadan dengan jenis kerosakan yang dijangkakan, tahap tenaga, kelajuan respons, dan persekitaran operasi. Strategi perlindungan yang dirancang dengan baik meningkatkan keselamatan, mengurangkan risiko kegagalan, dan menyokong ketahanan jangka panjang dalam sistem elektronik dunia sebenar.
Soalan Lazim (FAQ)
1. Mengapa PMIC dianggap sebagai penyelaras kuasa peringkat sistem dan bukan hanya pengawal voltan?
PMIC melakukan lebih banyak daripada menukarkan satu voltan kepada yang lain. Ia menguruskan bagaimana pelbagai rel dihasilkan, disequens, dipantau, diedarkan, dan dilindungi di seluruh sistem. Dalam reka bentuk praktikal, PMIC menyelaraskan rel pemproses, bekalan memori, seksyen RF, sensor, dan domain periferal sambil juga mengendalikan masa permulaan, pemulihan kesalahan, kejadian termal, dan isyarat kuasa yang baik. Oleh kerana semua tingkah laku ini berinteraksi semasa but dan operasi masa nyata, PMIC sering menjadi salah satu faktor utama yang membentuk ketahanan dan kestabilan sistem.
2. Mengapa kegagalan berkaitan PMIC sering muncul hanya di bawah beban kerja sebenar dan bukan semasa ujian makmal yang sederhana?
Ujian bench dengan beban statik jarang menghasilkan tingkah laku transien pantas yang dihasilkan oleh pemproses moden, pemancar RF, trafik memori, dan letupan sensor. Di bawah keadaan operasi yang realistik, rel mengalami lonjakan arus tiba-tiba yang mendedahkan kelemahan dalam respons transien, parasitik PCB, pencucuhan kompensasi, dan kestabilan rangkaian output. PMIC mungkin kelihatan stabil semasa ujian terkawal tetapi kemudian menunjukkan penurunan, overshoot, ringing, atau kecacatan urutan apabila beban kerja sebenar mencipta permintaan elektrik yang cepat berubah.
3. Mengapa pengurutan kuasa dianggap sebagai kontrak peringkat sistem dan bukannya hanya ciri permulaan yang sederhana?
Banyak sistem digital memerlukan hubungan masa tertentu antara rel utama, rel memori, bekalan I/O, isyarat reset, dan domain selalu aktif. Jika rel meningkat dalam urutan yang salah atau dengan masa yang tidak betul, pemproses, blok pengekalan SRAM, dan antaramuka berkecepatan tinggi mungkin memasuki keadaan operasi tidak ditakrifkan. Masalah ini sering menyebabkan kegagalan but yang berselang yang hanya muncul semasa suhu yang ekstrem, pemadaman, atau keadaan hot-plug bateri. Oleh itu, pengurutan yang betul menjadi suatu perjanjian yang tersusun antara keperluan perkakasan, perisian, dan silikon dan bukannya ciri kemudahan.
4. Mengapa respons transien PMIC boleh secara senyap menghadkan prestasi dunia sebenar CPU dan GPU?
Pemproses moden menghasilkan langkah arus yang tiba-tiba semasa operasi penggalak, beban kerja AI, lonjakan permainan, dan aktiviti radio. Jika PMIC tidak dapat mengekalkan voltan stabil semasa peristiwa ini, firmware mungkin mengurangkan tempoh penggalak, menurunkan kelajuan jam, atau meluaskan margin masa untuk mengelakkan keruntuhan. Dalam banyak produk, had penghantaran kuasa secara senyap mengehadkan prestasi berterusan walaupun pemproses itu sendiri kelihatan mampu di atas kertas. Respons transien yang stabil sering mempunyai lebih banyak pengaruh ke atas prestasi sistem yang boleh digunakan daripada spesifikasi kecekapan puncak sahaja.
5. Mengapa ribut dan bunyi penukaran dari PMIC menyebabkan masalah jauh melebihi subsistem kuasa itu sendiri?
Harmonik penukaran dan bunyi jalur lebar boleh bersambung ke dalam litar RF, rujukan ADC, PLL, pautan SERDES, dan laluan analog sensitif melalui impedans tanah bersama dan parasitik PCB. Walaupun tahap ribut yang agak kecil mungkin mengurangkan ketepatan ADC, meningkatkan bunyi fasa, mengecilkan margin masa, atau merosakkan kebolehpercayaan komunikasi berkelajuan tinggi. Sebuah rel yang kelihatan boleh diterima dari segi elektrik dalam pengasingan mungkin mencipta masalah integriti isyarat yang serius sebaik sahaja diintegrasikan ke dalam sistem campuran isyarat yang padat.
6. Mengapa had terma PMIC sering menentukan prestasi pengkomputeran maksimum yang berterusan?
Apabila suhu PMIC meningkat, kecekapan menurun dan mekanisme perlindungan terma mungkin mula mengurangkan arus yang tersedia atau mencetuskan tingkah laku lipatan. Dalam sistem padat, hotspot setempat dekat pemproses, memori, atau bahagian RF boleh memaksa PMIC untuk menurun terma jauh sebelum had elektrik teori dicapai. Oleh kerana ini, prestasi sistem yang mampan sering bergantung sama banyak kepada susun atur terma, penyebaran tembaga, dan pemilihan pakej seperti pada spesifikasi pengatur sendiri.
7. Mengapa jurutera sering menggabungkan penukar buck dengan pengatur LDO dalam reka bentuk sensitif?
Penukar buck memberikan pengurangan voltan yang cekap untuk rel arus tinggi tetapi memperkenalkan ribut penukaran dan EMI. LDO menghasilkan voltan keluaran yang lebih bersih dengan bunyi yang lebih rendah tetapi membebaskan lebih banyak haba apabila menurunkan voltan yang lebih besar. Kompromi biasa menggunakan penukar buck untuk menghasilkan rel pertengahan dengan cekap, diikuti oleh LDO untuk membersihkan bekalan analog atau RF sensitif yang terakhir. Gabungan ini menyeimbangkan kecekapan, pengurusan terma, dan pengurangan bunyi dengan lebih berkesan daripada bergantung pada salah satu topologi sahaja.
8. Mengapa dasar tindak balas ralat PMIC dianggap sebagai sebahagian daripada pengalaman produk keseluruhan?
Tingkah laku ralat menentukan sama ada produk dimatikan dengan bersih, memasuki gelung reboot, throttles dengan baik, atau menjadi tidak stabil semasa keadaan luar biasa. Perlindungan arus berlebihan, penutupan terma, pengendalian voltan rendah, dan penjadualan pemulihan secara langsung mempengaruhi bagaimana pengalaman dengan ralat bateri, masalah kabel, atau kejadian beban berlebihan. Dasar PMIC yang direka dengan baik mengasingkan ralat dengan boleh diramal dan memulihkan dengan cara yang terkawal, mengurangkan kerumitan perkhidmatan dan mengelakkan masalah kecil daripada meningkat menjadi kegagalan sistem secara menyeluruh.
9. Mengapa PMIC moden semakin bergantung pada telemetri dan dasar kuasa boleh diprogram?
Sistem moden menukar beban kerja, keadaan terma, aktiviti radio, dan tingkah laku pengecasan secara dinamik dalam masa nyata. Telemetri PMIC membolehkan firmware memantau keadaan rel, penggunaan arus, suhu, dan peristiwa ralat secara berterusan. Data ini membolehkan penskalaan voltan adaptif, pengurusan terma, throttling pintar, dan keputusan perlindungan yang terkoordinasi. Walau bagaimanapun, sistem kuasa boleh diprogram juga memperkenalkan kerumitan pengesahan baru kerana konfigurasi firmware yang salah boleh mencipta kegagalan yang tidak wujud dalam reka bentuk analog tetap.
10. Mengapa reka bentuk PMIC masa depan bergerak ke arah “orkestrasi kuasa” dan bukannya penukaran kuasa yang mudah?
PMIC masa depan semakin dijangka untuk menyelaraskan kecekapan, terma, tingkah laku EMI, perlindungan, penskalaan beban kerja, dasar pengecasan, dan telemetri sistem secara serentak. Teknologi penukaran yang lebih pantas, margin voltan yang lebih ketat, dan beban kerja yang sangat dinamik memerlukan PMIC untuk terus menyesuaikan tingkah lakunya berdasarkan keadaan operasi sebenar dan bukannya anggapan statik. Evolusi ini menjadikan PMIC sebagai subsistem pengurusan aktif yang bekerja rapat dengan firmware dan perisian sistem untuk mengekalkan operasi platform yang stabil, cekap, dan boleh diramal dalam keadaan yang berubah.
Blog Berkaitan
-
Berapa banyak sifar dalam satu juta, bilion, trilion?
![Berapa banyak sifar dalam satu juta, bilion, trilion?]()
2024/07/29
Juta mewakili 106, angka yang mudah difahami apabila dibandingkan dengan barang -barang sehari -hari atau gaji tahunan. Bilion, bersamaan dengan 109, ... -
IRLZ44N MOSFET datasheet, litar, setara, pinout
![IRLZ44N MOSFET datasheet, litar, setara, pinout]()
2024/08/28
IRLZ44N adalah MOSFET kuasa N-channel yang digunakan secara meluas.Terkenal dengan keupayaan beralih yang sangat baik, sangat sesuai untuk pelbagai ap... -
Suhu bateri terlalu rendah, pengecasan berhenti.Bagaimana untuk memperbaikinya?
![Suhu bateri terlalu rendah, pengecasan berhenti.Bagaimana untuk memperbaikinya?]()
2024/10/6
Isu pengecasan bateri telefon bimbit adalah perkara biasa tetapi boleh diuruskan dengan berkesan.Suhu memainkan peranan besar dalam kecekapan bateri, ... -
Panduan Komprehensif Transistor BC547
![Panduan Komprehensif Transistor BC547]()
2024/07/4
Transistor BC547 biasanya digunakan dalam pelbagai aplikasi elektronik, dari penguat isyarat asas ke litar pengayun kompleks dan sistem pengurusan kua... -
Panduan Komprehensif untuk SCR (Silicon Controlled Rectifier)
![Panduan Komprehensif untuk SCR (Silicon Controlled Rectifier)]()
2024/04/22
Silicon dikawal penerus (SCR), atau thyristors, memainkan peranan penting dalam teknologi elektronik kuasa kerana prestasi dan kebolehpercayaan mereka... -
LR621, SR621SW, 364, AG1 bersamaan bateri dan penggantian
![LR621, SR621SW, 364, AG1 bersamaan bateri dan penggantian]()
2024/07/15
Bateri butang LR621 dan SR621SW lazim dalam peranti elektronik padat seperti jam tangan, mainan kecil, kalkulator, dan kunci jauh.Pelbagai pengeluar m... -
Panduan Lengkap untuk Multiplexer dan Peranan mereka dalam Sistem Digital
![Panduan Lengkap untuk Multiplexer dan Peranan mereka dalam Sistem Digital]()
2025/09/20
Multiplexers adalah komponen dalam sistem digital, yang direka untuk menyalurkan isyarat input berganda ke dalam satu baris output menggunakan isyarat... -
Asas litar op-amp
![Asas litar op-amp]()
2023/12/28
Di dunia elektronik yang rumit, perjalanan ke misteri -misteri beliau selalu membawa kita ke kaleidoskop komponen litar, kedua -duanya indah dan kompl... -
Membandingkan perbezaan dan aplikasi NMOS dan PMOS
![Membandingkan perbezaan dan aplikasi NMOS dan PMOS]()
2024/11/15
Memahami perbezaan antara transistor NMOS dan PMOS adalah penting dalam merancang litar yang cekap.NMOS (N-jenis logam-oksida semikonduktor) dan PMOS ... -
CR2450 VS CR2032 Perbandingan: Semua yang anda perlu tahu
![CR2450 VS CR2032 Perbandingan: Semua yang anda perlu tahu]()
2025/09/15
Bateri butang seperti CR2450 dan CR2032 kuasa banyak elektronik setiap hari, dari jam tangan dan alat kawalan jauh ke peranti perubatan dan perindustr...










Bahagian panas
- GRJ32QR73A103KWJ1L
- MC7447AVU733NB
- RT0805BRE07137RL
- EP4CGX110DF31I7
- ADUM5200ARWZ-RL
- WM8976GEFL/RV
- STM8AF6268TDX
- LCMXO12OOC-3TN100C
- CGA4F4X7T2W153M085AA
- TAJA105K016H
- BCM59035C1IFB2G
- 171826-2
- TLV2473CDGQR
- X9429YV14-2.7
- ADS7818E/2K5G4
- LT1468IS8#PBF
- ZL50012QCG1
- MRF24J40MA-I/RM
- PIC16F1619-I/SS
- TPS60122PWP
- FPF2280BUCX
- GJM0335C1E6R2BB01D
- T495D226K035ATE125
- EPF10K10TC144-4N
- LT4356HDE-2
- S29GL01GS10TFI020
- LP8860HQVFPRQ1
- PS1080-A2
- X95820WV14IZ-2.7T1
- GRM0337U1H8R5DD01D
- MAX485CSA
- MBM29F080A-90PFTN
- TPA6160A2AYFFR
- MC74LVX32DR2
- LM3524DMX/NOPB
- PMB3520-8V
- BCM59056B0IUB1G
- ADXL372BCCZ-RL
- AD7846KPZ-REEL
- T495X336M035ZTE260
- VI-26R-MX
- BCM53115SKPBG
- DS2413DG-AA1-3C0+T
- XCR3960-7BG492C
- IDT54FCT244ALM
- TLE62306P
- TYE0HH221657RA
- MC10051BF1FAEA
- UPD61218AFA-100-EN7-A
- G20S-A