- Melayu
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Bagaimana Peranti IoT Berfungsi: Seni Bina, Komponen, dan Faktor Prestasi
Katalog
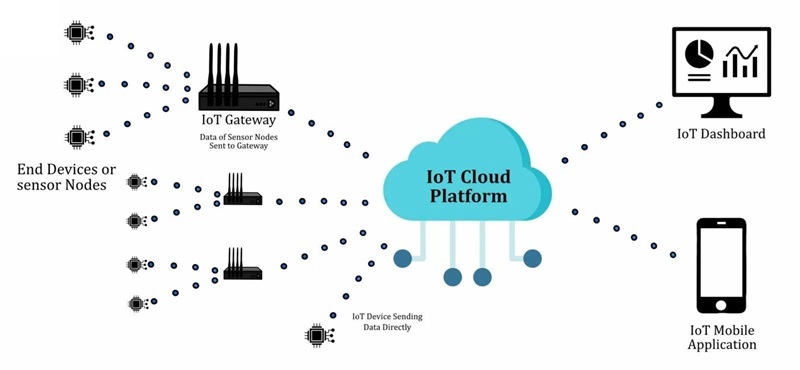
Bagaimana Peranti IoT Berfungsi
Produk IoT lebih mudah difahami apabila ia dianggap sebagai gelung tertutup dan dapat diukur: ia memerhati dunia fizikal, menukarkan apa yang diperhatikan ke dalam data yang boleh diuruskan oleh elektronik, memindahkan data itu ke tempat yang boleh ditafsirkan, dan kemudian mencetuskan satu respons. Banyak pasukan mula dengan mengejar "sambungan," dan itu boleh difahami, demo kelihatan hebat apabila papan pemuka dikemas kini dalam masa nyata, tetapi di lapangan, peranti dinilai dengan sama ada ia berfungsi dengan cara yang sama pada hari ke-3, hari ke-30, dan hari ke-300.
Gelung ini perlu bertahan daripada kekangan harian yang cenderung muncul pada masa yang paling tidak sesuai: kuasa terhad, latensi tidak dapat diramal, gangguan, siling kos, dan jangkaan keselamatan yang berkembang. Apabila gelung direkayasa dengan mengambil kira kekangan tersebut, lapisan rangkaian dan awan terasa seperti sambungan yang bersih kepada produk dan bukannya sumber kejutan dan kes khas yang rapuh.
Rasa: Menukarkan Isyarat Fizikal Menjadi Isyarat Elektrik
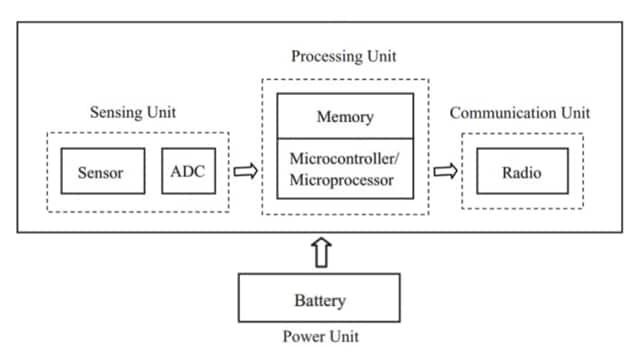
Di tepi, sensor menukarkan pembolehubah dunia nyata menjadi representasi elektrik yang boleh diukur oleh peranti. Pembolehubah mungkin bersifat persekitaran, mekanikal, atau elektrik, dan tugas sensor adalah untuk mencipta isyarat yang kekal boleh ditafsirkan di seluruh perubahan suhu, getaran, dan kepelbagaian pemasangan.
Pembolehubah dunia nyata yang lazim diukur:
• Suhu
• Getaran
• Tekanan
• Cahaya
• Pergerakan
• Arus
• Kepekatan gas
Output sensor biasanya diterima dalam salah satu daripada dua kategori, dan pilihan ini mempengaruhi segala-galanya yang berlaku seterusnya (reka bentuk depan, pensampelan, dan toleransi bunyi).
Jenis output sensor yang biasa:
• Analog: voltan atau arus yang sentiasa berubah
• Digital: bacaan berpaket melalui I²C/SPI/UART
Di luar keadaan makmal, ketepatan pengukuran bergantung kepada lebih daripada sekadar sensor itu sendiri. Faktor pemasangan seperti tempat, daya pemasangan, aliran udara, sumber haba berdekatan, laluan kabel, dan penggabungan mekanikal boleh memberi kesan yang ketara terhadap hasil.
Ralat pengukuran sering disebabkan oleh isu pemasangan dan bukannya kerosakan sensor. Permukaan pemasangan fleksibel atau struktur resonan boleh memutarbelitkan data dan menghasilkan bacaan yang mengelirukan. Menganggap pemasangan dan reka bentuk mekanikal sebagai sebahagian daripada sistem pengukuran membantu mengurangkan masa penyelesaian masalah dan meningkatkan kebolehpercayaan pengukuran.
Keadaan: Pendahuluan Analog (AFE) dan Kebersihan Isyarat
Banyak peranti mengarahkan output sensor mentah melalui pendahuluan analog (AFE) sebelum digitizing. Peringkat ini secara senyap-senyap membentuk sama ada sistem yang lain berfungsi dengan isyarat yang stabil dan boleh dipercayai atau dengan sesuatu yang hanya berfungsi dalam keadaan terkawal.
Fungsi AFE yang biasa:
• Biasing dan penghasilan rujukan untuk memastikan isyarat berada dalam julat input yang sah bagi ADC
• Penguatan (penguat instrumentasi, peringkat penguatan) untuk menjadikan isyarat kecil boleh diukur
• Penapisan (lulus rendah, penapisan anti-alias) untuk mengurangkan bunyi dan mengehadkan kandungan frekuensi tinggi yang mengelirukan
• Perlindungan (struktur ESD, perlindungan lonjakan, klamp input) untuk bertahan daripada kesilapan pendawaian dan pengendalian
Persekitaran operasi sebenar sering memperkenalkan sumber bunyi seperti motor, kabel panjang, pengatur suis, dan radio berdekatan. Kesan ini boleh menghasilkan ralat pengukuran yang mungkin kelihatan rawak sehingga sumbernya dikenal pasti.
Pembumian yang baik, penebat yang tepat, dan penapisan anti-alias asas sering meningkatkan kualiti isyarat dengan lebih berkesan daripada hanya bergantung pada penapisan perisian yang kompleks. Menangani bunyi di sumber biasanya menghasilkan pengukuran dan prestasi sistem yang lebih boleh dipercayai.
Tukar: Pengambilan Sampel ADC Dengan Pertukaran Sengaja
Apabila isyarat adalah analog, ADC menukarnya menjadi sampel digital. Penukaran itu sendiri adalah langsung; apa yang cenderung memerlukan pengalaman adalah memilih parameter pengambilan sampel yang berfungsi baik di bawah had bateri dan rangkaian sebenar.
Dua pilihan pengambilan sampel yang membentuk tingkah laku hiliran:
• Kadar pengambilan sampel: cukup pantas untuk menangkap fenomena, tetapi tidak begitu pantas sehingga membakar kuasa dan menghasilkan data yang tidak perlu
• Resolusi: cukup halus untuk mengesan perubahan signifikan tanpa menjadikan bunyi dan apungan kepada ketepatan palsu
Pengambilan sampel berfungsi dengan baik apabila ia dianggap sebagai keputusan tahap sistem dan bukannya spesifikasi terasing. Pengambilan sampel yang berlebihan boleh secara senyap memaksa lebih banyak aktiviti radio (dan masa radio sering kali yang menguras bateri terlebih dahulu). Pengambilan sampel yang tidak mencukupi boleh terlepas acara pendek yang bermakna dari segi operasi, lonjakan tekanan, impak, henti pendek, yang diingati pengguna kerana ia adalah saat sesuatu yang salah.
Kira: Pemprosesan Mikropengawal, Masa, dan Logik Tepi
Mikropengawal (MCU) biasanya membaca data sensor pada jadual yang teratur menggunakan pemasa, interupsi, dan DMA supaya masa peranti kekal konsisten walaupun firmware berkembang. Masa yang konsisten adalah salah satu butiran yang terasa membosankan sehingga hari anda menyahpepijat isu lapangan dan menyedari “isyarat” sebenarnya adalah jitter penjadualan.
Tugas pemprosesan biasa di pihak MCU:
• Penapisan digital (purata bergerak, median, IIR) untuk mengurangkan jitter dan pecahan
• Kalibrasi dan pampasan (pembetulan offset, pampasan suhu, linearization)
• Penilaian peraturan (ambang, histeresis, debouncing) untuk mencegah toggling yang tidak stabil
• Analitik tepi ringan (pengekstrakan ciri, penilaian anomali, pemampatan) untuk mengurangkan lebar jalur dan pengkomputeran awan
Pendekatan reka bentuk yang berguna adalah memisahkan data pengukuran daripada logik keputusan. Bacaan sensor boleh berfluktuasi kerana keadaan fizikal biasa, manakala tingkah laku sistem yang stabil boleh dikekalkan melalui histeresis, tingkap masa, dan kawalan mesin keadaan. Pemisahan ini membantu mengurangkan amaran palsu, meningkatkan kestabilan sistem, dan mencegah petunjuk ralat yang tidak betul apabila variasi pengukuran sementara berlaku.
Tidak semua keputusan mendapat manfaat daripada menunggu di awan. Beberapa tindakan adalah sensitif terhadap masa atau berorientasikan penghindaran kerosakan, dan menolak mereka dari peranti cenderung mencipta mod kegagalan yang tidak selesa apabila rangkaian perlahan atau tidak ada.
Contoh yang biasanya ditangani secara tempatan:
• Pemutusan arus berlebihan; perlindungan daripada terlalu panas; pengesanan henti motor
Awan cenderung bersinar apabila tugas mendapat manfaat daripada konteks yang lebih luas atau horizon masa yang lebih lama.
Kategori keputusan di pihak awan:
• Analisis trend jangka panjang dan penyelenggaraan ramalan
• Korelasi antara peranti
• Kemas kini model dan perubahan dasar seluruh armada
Peraturan praktikal yang sering digabungkan oleh pasukan adalah mudah: jika arahan yang ditangguhkan boleh membawa kepada kerosakan, peranti harus melindungi dirinya terlebih dahulu dan melaporkan selepas itu. Pendekatan itu biasanya terasa konservatif dalam cara yang baik, terutama apabila anda adalah orang yang dihubungi semasa gangguan rangkaian.
Berkomunikasi: Pautan Radio/Wayar dan Protokol Aplikasi
Lapisan komunikasi memindahkan telemetri ke telefon, pintu masuk, atau titik akhir awan. Memilih teknologi pautan kurang tentang apa yang trendy dan lebih tentang apa yang sepadan dengan persekitaran fizikal, model penyebaran, dan belanjawan kuasa.
Pilihan kesambungan biasa:
• Wi‑Fi; BLE; Zigbee/Thread; selular (LTE-M/NB-IoT); Ethernet
Di atas lapisan pautan, peranti menggunakan protokol aplikasi untuk menyusun dan menyampaikan mesej. Protokol yang betul cenderung bergantung pada sama ada produk memerlukan telemetri strim, aliran kerja konfigurasi, atau keserasian dengan saluran perniagaan yang sedia ada.
Protokol aplikasi biasa:
• MQTT
• HTTP
Penerapan nyata jarang menawarkan sambungan yang stabil. Titik akses reboot, gerbang menghilang, liputan selular berubah, dan gangguan datang dan pergi. Peranti terasa jauh lebih boleh dipercayai apabila mereka dapat menyimpan data, mencuba dengan kawalan (bukan dengan cara yang menimbulkan DDOS kepada rangkaian), dan mengekalkan tingkah laku keadaan terakhir yang jelas supaya sistem tetap dapat difahami apabila pautan tidak sempurna.
Telemetri biasanya dilindungi dengan TLS untuk kerahsiaan dan integriti. Dalam banyak produk, kemenangan keselamatan yang pertama adalah dengan menghidupkan penyulitan di mana-mana, tetapi keselamatan yang tahan lama pergi lebih jauh dengan menjadikan identiti dan kemas kini dapat diurus sepanjang hayat peranti.
Blok bangunan keselamatan biasa:
• Identiti peranti unik dan pengesahan berasaskan sijil
• Penyimpanan kunci yang selamat (elemen selamat atau zon kepercayaan MCU)
• Firmware yang ditandatangani dan but yang selamat untuk mengurangkan kemungkinan pelaksanaan kod tidak sah
Terdapat satu corak yang dikenali oleh pasukan berpengalaman (selalunya selepas mempelajarinya dengan cara yang sukar): kerja keselamatan menjadi jauh kurang menyakitkan apabila identiti, pengurusan kunci, dan laluan kemas kini dirancang lebih awal. Apabila asas-asas itu dirancang dari awal, peranti cenderung untuk terus berfungsi selama bertahun-tahun, bukan hanya sehingga kemas kini lapangan utama yang pertama.
Awan dan Data
Di dalam awan (atau platform di premis), data disimpan, sering dalam sistem siri masa, kemudian diagregat dan dianalisis. Awan adalah tempat di mana telemetri mentah dapat diubah menjadi output yang akan diambil tindakan oleh seseorang, sama ada seseorang itu pengguna, pengendali, atau enjin dasar automatik.
Output awan biasa:
• Amaran (pelanggaran ambang, pengesanan ralat)
• Ramalan (hayat berguna yang tinggal, pengesanan drift)
• Papan pemuka (KPI, tren, kesihatan armada/peranti)
• Perintah kawalan (titik set, jadual, menghidupkan/mematikan tindakan)
Nilai awan paling mudah ditangkap apabila pasukan memutuskan di awal keputusan apa yang data seharusnya menyokong. Tanpa disiplin itu, telemetri mempunyai kecenderungan untuk menjadi bunyi latar belakang yang mahal, dikumpulkan dengan canai, disimpan dengan patuh, dan kemudian jarang digunakan dengan keyakinan.
Actuate: Melaksanakan Perintah Dengan Selamat dan Berulang
Perintah yang dihantar kembali ke peranti menggerakkan penggerak, dan bahagian gelung ini adalah tempat realiti perkakasan menjadi bising. Pelaksanaan memerlukan litar pemacu yang sesuai dengan beban, dan ia mendapat manfaat daripada pagar yang menjadikan kegagalan dapat diramalkan daripada kekacauan.
Penggerak biasa:
• Motor
• Injap
• Relay
• Pemanas
• LED
• Pembesar suara
Elemen pemacu dan perlindungan biasa:
• MOSFET; relay; H-bridges; triacs (bergantung pada ciri beban)
• Diod flyback dan snubber (untuk beban induktif)
• Pengesanan arus dan perlindungan haba
• Pengesahan keadaan apabila ada (suis had, maklumbalas kedudukan, tandatangan elektrik)
Sikap kebolehpercayaan yang cenderung memberikan hasil adalah mengandaikan pelaksanaan adalah di mana risiko tertumpu. Sensor sering gagal dengan senyap; penggerak boleh gagal dengan cara yang segera diperhatikan pengguna. Perlindungan mudah, masa tamat, pengunci, semakan sanity, sering menghalang isu berangkai dan menjadikan sistem terasa lebih boleh dipercayai semasa kes tepi aneh yang tidak dapat dielakkan.
Gelung diulang
Rasa ini; pengiraan, komunikasi, pelaksanaan berulang secara berterusan. Secara tempatan, ia mungkin berjalan dalam milisaat; perjalanan pusingan awan mungkin mengambil masa beberapa saat bergantung pada rangkaian dan beban backend. Produk yang baik menganggap masa dan kuasa sebagai input reka bentuk yang membentuk setiap keputusan lain, bukan sebagai fikiran yang diabaikan untuk dioptimumkan pada akhir.
Strategi peringkat sistem biasa:
• Gunakan pemprosesan tepi untuk mengurangkan penghantaran yang tidak perlu
• Kelompok dan mampatkan telemetri apabila toleransi latensi membenarkannya
• Tidur secara agresif dan bangun dengan ramalan pada peranti yang dikuasakan bateri
• Mengekalkan "tingkah laku minimum yang boleh diterima" walaupun awan tidak dapat dicapai
Peranti IoT yang tahan lama tidak ditakrifkan oleh mana-mana komponen tunggal. Ia ditakrifkan oleh betapa tenangnya keseluruhan gelung berfungsi apabila realiti menyimpang dari pelan: isyarat bising, rangkaian yang terputus, perkakasan yang semakin tua, dan tingkah laku pengguna yang tidak dapat diramalkan. Merancang dengan mengambil kira syarat-syarat tersebut sering merupakan perbezaan antara demo yang berfungsi sekali dan produk yang mengekalkan ketenangannya tahun demi tahun.
Komponen Elektronik pada Prestasi Peranti IoT
Perkakasan IoT cenderung untuk terasa boleh dipercayai hanya apabila input sensor, pengiraan, penyimpanan, penghantaran kuasa, dan sambungan dibentuk sebagai satu laluan isyarat-dan-kuasa yang berterusan.
Bacaan sensor jarang kekal bermakna jika voltan rujukan berubah, jika jam bergetar, atau jika laluan data kadangkala kehilangan byte di bawah beban. Pautan radio jarang kekal boleh digunakan jika bekalan merosot semasa semburan penghantaran, jika pengayun bising, atau jika pengendalian kelayakan tidak konsisten di seluruh reset.
Banyak pasukan belajar bahawa kebolehpercayaan sering meningkat lebih daripada mengetatkan sempadan blok ke blok daripada menambahkan ciri lain: rel yang boleh diramalkan, masa yang terhad, penghubungan bunyi yang terkawal, dan tingkah laku gagal yang dapat difahami apabila sesuatu pecah.
Matlamat reka bentuk bukanlah "bahagian yang sempurna," tetapi antara muka yang berfungsi dengan cara yang sama di bangku pemaju, dalam pengeluaran perintis, dan berbulan-bulan kemudian di lapangan.
Sensor
Sensor menukar keadaan dunia nyata menjadi isyarat elektrik, tetapi tingkah laku produk sehari-hari dibentuk oleh butiran yang kelihatan kecil sehingga data lapangan menjadikannya terasa tidak selesa besar.
Bunyi, drift, pemasangan, aliran udara, kondensasi, dan pengaturan kabel semua mempunyai cara untuk mengubah plot makmal yang bersih menjadi sebaran yang kotor yang perlu dihadapi oleh perisian.
Julat dan resolusi perlu sesuai dengan keputusan yang diambil, bukan spesifikasi utama. Konfigurasi yang terlalu sensitif sering menguatkan bunyi dan drift, yang cenderung meningkatkan positif palsu dan secara senyap meningkatkan masa pengiraan dan masa udara radio. Julat yang paling ketat boleh kelihatan boleh dipertahankan semasa semakan reka bentuk, tetapi tingkah laku lapangan sering memihak kepada julat yang sedikit lebih lebar yang menghasilkan pengukuran yang lebih stabil dan lebih boleh ditafsirkan. Jika model atau ambang hiliran akan meratakan data juga, menolak sensitiviti mentah terlalu jauh boleh terasa memuaskan pada awalnya dan kemudian mengecewakan apabila tiket sokongan tiba.
Drift, penuaan, dan pendedahan menentukan sama ada pengukuran kekal boleh dipercayai selepas berbulan-bulan atau bertahun-tahun.
Kalibrasi biasanya berfungsi dengan lebih baik apabila dianggap sebagai rutin kitaran hayat daripada ritual kilang tunggal yang diharapkan oleh semua orang akan bertahan selamanya.
• Kalibrasi kilang dengan koefisien yang disimpan.
• Pemicu kalibrasi semula di lapangan (berjadual, berdasarkan acara, atau dibantu juruteknik).
• Rutin semak diri yang menandakan luar biasa, pemotongan, dan kemampatan.
Pasukan yang bercita-cita untuk produk yang boleh diperbaiki sering mengetepikan sedikit flash dan pengiraan untuk metadata kalibrasi, kebolehubahan, dan semakan kesihatan, kerana ia lebih murah daripada menjelaskan bacaan yang tidak konsisten selepas penyebaran.
Pemilihan kadar pensampelan biasanya menjadi perundingan antara fizik, bateri, dan kegunaan data. Pensampelan terlalu perlahan berisiko mendapatkan aliasing dan acara yang terlepas, yang boleh sukar didiagnosis kerana data tetap kelihatan masuk akal. Pensampelan terlalu cepat meningkatkan penggunaan kuasa dan jumlah data, dan ia boleh mencipta ilusi sedikit pandangan yang lebih baik tanpa meningkatkan keputusan secara material.
Pola yang bertahan dengan baik adalah menangkap fenomena dengan margin yang mencukupi, penapisan awal (analog apabila ia benar-benar membantu, digital apabila ia mencukupi), dan pensampelan untuk laporan.
Ini sering menghasilkan hasil bateri yang lebih baik daripada pensampelan secara agresif dan berharap analitik awan akan mengimbangi kemudian.
Sama ada ADC luaran diperlukan biasanya bergantung kepada resolusi, impedans input, kestabilan rujukan, dan toleransi bunyi. ADC terintegrasi dalam MCU sering berfungsi dengan baik untuk pengesanan resolusi pertengahan, sementara isyarat ketepatan cenderung menghukum pemilihan susun atur dan rujukan yang tidak berhati-hati.
• Pemilihan rujukan bising rendah dan pengaturan rujukan.
• Strategi pengasasan, jejak pelindung, dan kawalan laluan pulangan.
• Pelindung dan pengaturan kabel yang disengajakan berhampiran penyambung.
• Perlindungan ESD diletakkan di tempat yang sebenarnya memintas transien.
Perubahan PCB kecil boleh mengurangkan getaran secara ketara dan meningkatkan kebolehulang, terutama untuk sumber berimpedans tinggi atau isyarat analog tahap rendah di mana "hampir baik" menjadi tidak stabil secara jelas dalam data pengeluaran.
Mikropengkalan (MCU)
MCU bertindak sebagai pusat operasi: ia membaca sensor melalui GPIO, I²C, SPI, dan UART; mengendalikan isyarat; menjalankan inferens di mana perlu; mengurus mod kuasa; dan menggerakkan output.
Apabila tingkah laku MCU boleh diramalkan, keseluruhan peranti terasa tenang; apabila tidak, kegagalan cenderung kelihatan rawak walaupun sebabnya deterministik.
Firmware yang stabil biasanya datang daripada mesin keadaan eksplisit dan masa yang mempunyai batas yang jelas. Reka bentuk yang didorong oleh acara menggunakan gangguan, DMA, dan pemasa biasanya mengalahkan gelung pengundian dalam responsif dan tenaga, terutama dalam peranti yang sering tidur.
Apabila pasukan menggambarkan penguncian rawak, pelakunya sering merupakan salah satu daripada beberapa pelanggar berulang: kerja tanpa had dalam gangguan, kunci mati bas bersama, pengudaraan keutamaan, atau pecahan memori yang tidak pernah diuji di bawah waktu positif yang panjang.
Perancangan RAM dan flash berfungsi lebih baik apabila ia termasuk apa yang berlaku selepas demo pertama berjaya.
• Penampan rangkaian dan overhead TLS (termasuk tingkah laku sambungan terburuk).
• Log, metrik, dan dump runtuh yang akan diminta oleh jurutera kemudian.
• Ruang staging OTA, ditambah metadata untuk pemeriksaan integriti.
• Kecenderungan ciri yang dijangkakan tiba selepas maklum balas perintis.
Memori yang kekurangan saiz sering kekal senyap pada awalnya dan kemudian menjadi menyakitkan kemudian, tepat ketika diagnosis dan keselamatan kemas kini menjadi alat utama untuk mengawal risiko lapangan.
Peranti yang diharapkan untuk dipercayai biasanya mendapat manfaat daripada boot yang selamat, penyimpanan kunci yang dilindungi, percepatan kripto perkakasan, dan penghasil nombor rawak yang benar. Dari pengalaman penyebaran, pengubahsuaian keselamatan cenderung merasa tidak selesa kerana ia bertentangan dengan sekatan perkakasan yang dihantar dan kredential yang bertahan lama.
Memilih MCU (atau menambah elemen selamat) yang menyokong identiti yang kuat dan boot yang diukur sering mengurangkan jumlah perisian yang pintar yang diperlukan untuk mengimbangi akar kepercayaan yang lemah.
Akses untuk SWD/JTAG dan kebolehan ujian praktikal biasanya memutuskan sama ada pembuatan awal adalah terkawal atau huru-hara.
• Perancangan akses SWD/JTAG dan strategi kunci untuk pengeluaran.
• Kepingan ujian dan tata letak mesra probe untuk fixture dengan jumlah tinggi.
• Titik penderiaan tenaga dan nod yang boleh diukur untuk triage yang cepat.
Jumlah kecil infrastruktur ujian boleh menyelamatkan pasukan dari minggu-minggu tekaan yang tidak selesa ketika kumpulan besar pertama mendedahkan kes-kes sudut yang tidak pernah muncul pada prototaip yang dibina dengan tangan.
Modul Komunikasi
Modul komunikasi membentuk lebih daripada anggaran pautan: ia mempengaruhi penyediaan, tingkah laku kemas kini, aliran sokongan, dan sejumlah mod kegagalan yang mengejutkan.
Dalam peranti bateri, tingkah laku radio sering mendominasi penggunaan tenaga, jadi keputusan konektiviti cenderung menjadi keputusan hayat bateri yang menyamar.
Pemilihan biasanya mengimbangi jarak, latensi, throughput, topologi, dan anggaran kuasa, dengan pandangan yang jujur terhadap geseran operasional.
• BLE untuk jarak pendek, kuasa rendah, dan penyediaan telefon pintar.
• Wi‑Fi untuk throughput yang lebih tinggi dengan arus puncak yang lebih tinggi dan permintaan integriti kuasa yang lebih ketat.
• Thread/Zigbee untuk rangkaian mesh dan penyebaran rumah/industri berkuasa rendah.
• LoRaWAN untuk jarak jauh, kadar data rendah, dan disiplin muatan yang ketat.
• LTE‑M/NB‑IoT untuk liputan kawasan luas dengan sekatan pembawa dan penyediaan yang lebih kompleks.
Pasukan sering merasa lega setelah mereka mengakui bahawa "pilihan radio" tidak dapat dipisahkan dari strategi percubaan firmware, pengurusan arus puncak, dan kesabaran pengguna semasa penyediaan.
Modul yang kuat masih boleh mengecewakan jika antena diletakkan dengan buruk, dimatikan oleh pembungkusan, atau terdedah kepada pengembalian tanah yang bising.
• Zon penghalang antena dan laluan impedans terkawal.
• Kesan pembungkusan dan ujian interaksi pengguna.
• Pemeriksaan emisi yang dipancarkan dan pengujian kerentanan.
Apabila margin pautan tipis, percubaan firmware boleh menyembunyikan gejala untuk sementara waktu, tetapi kos bateri akan terkumpul dengan cara yang diperhatikan oleh pasukan operasi jauh lebih awal sebelum jurutera melihatnya di makmal.
Reka bentuk konektiviti harus bertahan dalam aliran kerja sebenar daripada demonstrasi ideal.
• Penyediaan yang mentolerir kegagalan separa dan kesilapan pengguna yang biasa.
• Logik pemunduran dan percubaan yang mengelakkan kitaran pengeringan bateri yang diakibatkan sendiri.
• Tingkah laku merayau ditambah pengurusan kitaran hayat SIM/eSIM untuk peranti selular.
• OTA dengan pengesahan, rollback, dan penjadualan yang menyedari lebar jalur.
Fungsi OTA kurang berfungsi seperti ciri yang bersinar dan lebih berfungsi seperti saluran penyelenggaraan jangka panjang; apabila ia diurus dengan sambil lewa, peranti cenderung menjadi mahal untuk disokong, walaupun pelancaran pertama kelihatan baik.
Pengurusan Kuasa
Reka bentuk kuasa memastikan peranti tetap hidup, boleh diulang, dan membosankan, dalam erti kata yang terbaik. Ia meliputi pengatur, pengecasan, pengukuran bahan api, penukaran beban, dan pilihan perlindungan yang mesti mengendalikan kedua-dua kejadian arus puncak dan jangkaan tidur yang dalam.
Pemilihan buck/boost/LDO mendapat manfaat dari menilai kecekapan merentasi julat beban penuh, bukan hanya satu titik operasi. Arus tenang mod tidur sering menentukan sama ada produk memenuhi jangkaan bateri.
Radio boleh menyebabkan lonjakan arus yang tajam; kapasitans pukal, laluan impedans rendah, dan gelung kawalan yang stabil cenderung memutuskan sama ada sistem tetap berfungsi semasa letupan transmisi. Banyak tetapan semula yang misteri berakhir kembali kepada kejatuhan sementara daripada firmware, yang boleh menjadi pelajaran yang merendahkan tetapi berguna semasa integrasi.
Hayat bateri biasanya dimenangi semasa tidur, di mana kebocoran kecil menjadi kerugian yang boleh diukur.
• Konfigurasi tidur dalam dengan hanya sumber bangun yang benar-benar digunakan.
• RTC atau pemasa kuasa rendah untuk bangun berkala.
• GPIO atau gangguan sensor untuk bangun berdasarkan peristiwa.
• Pengawalan kuasa untuk sensor dan periferal yang tidak memerlukan bias terus.
Mengukur arus tidur awal pada perkakasan sebenar, kemudian menganggap peningkatan mikroamp yang tidak dijangka sebagai pepijat, cenderung mencegah merayap perlahan di mana banyak blok “hampir mati” secara senyap menghakis waktu operasi.
Pemilihan IC pengecas bergantung kepada kimia, had terma, sekatan peraturan, dan persekitaran yang dijangkakan. Pemilihan pengukur bahan bakar harus mencerminkan keperluan ketepatan merentasi suhu, beban, dan penuaan. Untuk penyebaran luar atau tiada pemanasan, tingkah laku suhu rendah sering menjadi pemandu kualiti yang dirasakan, jadi ambang voltan yang konservatif dan pelaporan kapasiti yang jujur mengurangkan aduan pemberhentian mendadak.
Arus berlebihan, voltan berlebihan, polariti terbalik, dan tingkah laku ESD harus dianggap sebagai keadaan operasi rutin untuk banyak penyebaran. Persekitaran industri biasanya menghasilkan peristiwa pelepasan kabel dan transien induktif yang boleh kelihatan seperti “nasib buruk” kecuali reka bentuk anticipates mereka. Penjepit, fius, diod TVS, kawalan arus permulaan, dan keputusan pengasingan yang sesuai sering menentukan sama ada peranti bertahan sebulan pertama dengan reputasi yang utuh.
Komponen Penyimpanan
Penyimpanan memegang firmware, konfigurasi, sijil, dan log. Memilih antara NOR/NAND flash, EEPROM, FRAM, eMMC, atau microSD cenderung didorong oleh ketahanan, prestasi, kos BOM, dan betapa menyusahkannya penulisan yang rosak secara operasional.
Peranti sebenar menghadapi gangguan elektrik, reset watchdog, dan penulisan separa.
• Cekseum atau CRC untuk konfigurasi dan log.
• Pelan pemakaian atau frekuensi penulisan terhad untuk media berasaskan flash.
• Pencatatan jurnal atau rekod tambah sahaja untuk data yang tidak boleh ditulis separuh.
Corak operasi yang kerap adalah pencatatan buffer gelang dengan kadar penulisan terhad, yang mengehadkan penggunaan ketahanan yang senyap sambil masih meninggalkan cukup petunjuk untuk membetulkan isu lapangan.
Slot firmware A/B ditambah logik boot yang disahkan dan rollback menyediakan jaring keselamatan praktikal semasa kemas kini yang terganggu. Tanpa perlindungan ini, kehilangan kuasa tunggal semasa kemas kini boleh menyebabkan peranti terasing di lapangan. Produk yang berkembang dengan lancar biasanya menganggap kebolehan untuk pulih pada tahap yang sama dengan ciri penghantaran, kerana kos sokongan cenderung mengikuti kualiti cerita pemulihan.
Sijil dan kunci harus disimpan dengan mengambil kira ketahanan terhadap pencerobohan dan kawalan akses, bukan sekadar di tempat yang tidak mudah hilang. Bahkan dengan penyimpanan yang selamat, rancangan untuk pertukaran kunci, pembatalan, dan respons insiden mengurangkan pendedahan jangka panjang apabila kelayakan bocor atau armada terjejas sebahagiannya.
Komponen Antara Muka
LED, paparan, butang, mikrofon, kamera, dan sensor biometrik membentuk kebolehgunaan, tetapi mereka juga menarik kuasa, risiko EMI, dan pertimbangan privasi. UI yang terasa konsisten di bawah tekanan sering mencerminkan reka bentuk elektrik yang disiplin lebih daripada kilauan UI.
Butang cenderung memerlukan penghalang dan perlindungan ESD untuk mengelakkan bacaan yang tidak konsisten.
Mikrofon dan kamera cenderung memerlukan rel yang bersih dan pengkalan yang berhati-hati untuk mengelakkan artefak sesekali yang ditafsirkan pengguna sebagai “tidak konsisten.”
• Pemisahan laluan analog sensitif daripada laluan suis arus tinggi dan RF.
• Perancangan laluan pulang untuk mengehadkan penggabungan bunyi.
• Pilihan penebat dan penapisan yang sepadan dengan strategi pembungkusan dan kabel.
Kegagalan UI yang tidak konsisten sering disebabkan oleh penggabungan daripada radio atau motor, dan ia boleh menjadi sangat memuaskan untuk membetulkannya dengan disiplin susun atur dan pengkalan daripada penyelesaian firmware tanpa henti.
Peranti berkelakuan lebih dapat diramalkan apabila mereka mempunyai kisah luar talian yang tidak bergantung pada rangkaian yang tersedia.
Maklum balas tempatan yang jelas (keadaan LED yang tidak bercanggah dan isyarat ralat yang minima dan tepat) cenderung mengurangkan beban sokongan dan mengelakkan kekecewaan pengguna yang datang dari tingkah laku kegagalan senyap.
Aktuator
Aktuator menukarkan niat kawalan kepada gerakan, haba, atau daya, dan mereka biasanya memerlukan litar antara muka yang lebih daripada pin MCU yang langsung. Oleh kerana aktuator berinteraksi dengan dunia fizikal, mod kegagalan cenderung kelihatan, mahal, dan meningkatkan emosi bagi pengguna. Motor, solenoid, injap, dan relay biasanya memerlukan peringkat MOSFET, H-jambatan, atau IC penggerak khusus yang disesuaikan untuk arus dan transien sebenar.
• Diode flyback atau snubber untuk beban induktif.
• Pengesanan arus untuk pengesanan terhenti dan respons overload.
• Pertimbangan reka bentuk terma untuk beban berterusan atau berprestasi tinggi.
Pengalaman lapangan sering menunjukkan isu berkaitan aktuator sebagai sumber kegagalan yang kerap, dan pengurangan konservatif serta pengesanan kesilapan cenderung memperbaiki tingkah laku armada dengan cara yang cepat diperhatikan oleh pasukan sokongan.
Peranti harus tetap selamat apabila firmware terhempas, awan tidak dapat dihubungi, atau arahan tiba terlambat.
• Watchdog dan strategi reset yang selaras dengan output yang selamat.
• Keadaan output default yang selamat ditentukan mengikut aktuator dan mod.
• Kedudukan fail selamat mekanikal di mana aplikasi memerlukannya.
Reka bentuk yang paling tahan lasak menganggap kehilangan sambungan sebagai mod operasi normal dan mendefinisikan dengan tepat apa yang dilakukan penggerak dalam tempoh itu, jadi tingkah laku tetap boleh diramal walaupun semuanya yang lain tidak sempurna.
Integrasi Peringkat Sistem
Penambahbaikan yang berkepentingan tinggi sering datang daripada amalan integrasi yang memaksa keseluruhan sistem untuk menyatakan kebenaran lebih awal.
• Pengesahan integriti kuasa di bawah beban radio dan penggerak yang paling teruk.
• Kawalan bunyi merentasi penginderaan analog, pengatur suis, dan pemacu arus tinggi.
• Aliran but, kemas kini, dan pemulihan dengan keadaan yang boleh diukur dan kebolehan penglihatan yang jelas.
• Ujian alam sekitar (suhu, kelembapan, getaran) yang dipilih untuk sepadan dengan keadaan penempatan sebenar.
Apabila aktiviti ini dianggap sebagai kerja kejuruteraan sehari-hari dan bukannya upacara akhir, pemilihan komponen biasanya menjadi kurang dramatik, dan tingkah laku peranti cenderung kekal konsisten dari prototaip hingga ke pengedaran massa.
Kesimpulan
Sistem IoT yang berjaya bergantung pada lingkaran data yang lengkap dan boleh dipercayai yang merangkumi penginderaan, pengkondisian isyarat, pemprosesan, komunikasi, keselamatan, dan pengurusan kuasa. Setiap peringkat mempengaruhi prestasi keseluruhan, jangka hayat bateri, ketepatan, dan pengalaman pengguna. Dengan menyeimbangkan keperluan perkakasan, perisian, rangkaian, dan operasi, peranti IoT dapat memberikan pemantauan, kawalan, dan pengautomasian yang boleh dipercayai di seluruh pelbagai aplikasi.
Soalan yang Sering Diajukan [FAQ]
1. Mengapa banyak projek IoT gagal kerana kualiti pengukuran dan bukannya masalah sambungan?
Sambungan sering menerima perhatian yang paling banyak semasa pembangunan kerana papan pemuka dan integrasi awan sangat jelas. Namun, pengukuran yang tidak tepat disebabkan oleh penempatan sensor yang buruk, getaran, kesan aliran udara, penyambungan termal, bunyi, atau kesilapan pemasangan boleh merosakkan keseluruhan sistem. Jika data asal tidak boleh dipercayai, walaupun analitik, platform awan, dan rangkaian komunikasi yang paling canggih tidak dapat menghasilkan keputusan yang boleh dipercayai. Kejayaan jangka panjang IoT biasanya bermula dengan pengukuran yang stabil dan bukannya ciri sambungan yang canggih.
2. Mengapa pemasangan sensor perlu dianggap sebagai sebahagian daripada sistem penginderaan itu sendiri?
Sensor mengukur keadaan fizikal melalui interaksi mereka dengan persekitaran sekeliling. Kuasa pemasangan, reka bentuk penutup, penyambungan kabel, aliran udara, pemindahan getaran, dan sentuhan terma semuanya boleh mengubah apa yang sensor perhatikan. Sensor yang dikalibrasi dengan sempurna masih boleh menghasilkan bacaan yang mengelirukan jika ia dipasang dengan buruk. Dalam banyak penempatan, kesilapan yang berkaitan dengan pemasangan menyumbang lebih banyak ketidakpastian pengukuran daripada spesifikasi sensor itu sendiri, menjadikan integrasi mekanikal sebagai bahagian kritikal dalam prestasi penginderaan keseluruhan.
3. Mengapa oversampling sering menjadi ancaman tersembunyi kepada jangka hayat bateri dalam peranti IoT?
Mengambil sampel data lebih kerap daripada yang diperlukan meningkatkan beban pemprosesan, penggunaan memori, dan aktiviti komunikasi. Oleh kerana penghantaran tanpa wayar sering menjadi pengguna tenaga terbesar dalam produk IoT yang dikuasakan oleh bateri, mengumpul data yang berlebihan boleh secara tidak langsung meningkatkan penggunaan radio dan memendekkan masa operasi. Walaupun kadar pengambilan sampel yang tinggi mungkin kelihatan meningkatkan ketepatan, ia sering menghasilkan set data yang lebih besar tanpa memberikan peningkatan bermakna dalam kualiti keputusan. Strategi pengambilan sampel yang berkesan menyeimbangkan keperluan pengesanan kejadian dengan penggunaan kuasa dan keperluan pelaporan.
4. Mengapa peranti IoT yang berjaya memisahkan logik pengukuran daripada logik membuat keputusan?
Nilai sensor mentah secara semula jadi berfluktuasi kerana bunyi, variasi alam sekitar, dan tingkah laku proses normal. Jika setiap pengukuran secara langsung mencetuskan tindakan, sistem boleh menjadi tidak stabil dan menghasilkan amaran palsu. Dengan memisahkan pengumpulan pengukuran daripada logik keputusan menggunakan histeresis, mesin keadaan, penapisan, tingkap masa, dan peraturan pengesahan, peranti boleh kekal responsif sambil mengelakkan reaksi yang tidak perlu terhadap fluktuasi sementara. Pendekatan ini meningkatkan kebolehpercayaan dan mencipta tingkah laku sistem yang lebih boleh diramal dalam keadaan dunia sebenar.
5. Mengapa banyak keputusan kritikal IoT diproses secara tempatan dan bukannya diberikan kepada awan?
Sistem awan menyediakan analisis jangka panjang yang berharga, pengurusan armada, dan pandangan ramalan, tetapi kelewatan rangkaian dan gangguan boleh menjadikannya tidak sesuai untuk fungsi perlindungan yang sensitif terhadap masa. Kejadian seperti keadaan arus berlebihan, terlalu panas, kelewatan motor, atau penutupan keselamatan sering memerlukan tindakan segera. Menunggu pengesahan awan boleh membenarkan kerosakan peralatan atau keadaan tidak selamat berkembang. Oleh itu, keputusan perlindungan dan kawalan yang kritikal biasanya dilaksanakan di hujung sambil platform awan memberi tumpuan kepada pemantauan dan pengoptimuman.
Blog Berkaitan
-
Berapa banyak sifar dalam satu juta, bilion, trilion?
![Berapa banyak sifar dalam satu juta, bilion, trilion?]()
2024/07/29
Juta mewakili 106, angka yang mudah difahami apabila dibandingkan dengan barang -barang sehari -hari atau gaji tahunan. Bilion, bersamaan dengan 109, ... -
IRLZ44N MOSFET datasheet, litar, setara, pinout
![IRLZ44N MOSFET datasheet, litar, setara, pinout]()
2024/08/28
IRLZ44N adalah MOSFET kuasa N-channel yang digunakan secara meluas.Terkenal dengan keupayaan beralih yang sangat baik, sangat sesuai untuk pelbagai ap... -
Suhu bateri terlalu rendah, pengecasan berhenti.Bagaimana untuk memperbaikinya?
![Suhu bateri terlalu rendah, pengecasan berhenti.Bagaimana untuk memperbaikinya?]()
2024/10/6
Isu pengecasan bateri telefon bimbit adalah perkara biasa tetapi boleh diuruskan dengan berkesan.Suhu memainkan peranan besar dalam kecekapan bateri, ... -
Panduan Komprehensif Transistor BC547
![Panduan Komprehensif Transistor BC547]()
2024/07/4
Transistor BC547 biasanya digunakan dalam pelbagai aplikasi elektronik, dari penguat isyarat asas ke litar pengayun kompleks dan sistem pengurusan kua... -
Panduan Komprehensif untuk SCR (Silicon Controlled Rectifier)
![Panduan Komprehensif untuk SCR (Silicon Controlled Rectifier)]()
2024/04/22
Silicon dikawal penerus (SCR), atau thyristors, memainkan peranan penting dalam teknologi elektronik kuasa kerana prestasi dan kebolehpercayaan mereka... -
LR621, SR621SW, 364, AG1 bersamaan bateri dan penggantian
![LR621, SR621SW, 364, AG1 bersamaan bateri dan penggantian]()
2024/07/15
Bateri butang LR621 dan SR621SW lazim dalam peranti elektronik padat seperti jam tangan, mainan kecil, kalkulator, dan kunci jauh.Pelbagai pengeluar m... -
Panduan Lengkap untuk Multiplexer dan Peranan mereka dalam Sistem Digital
![Panduan Lengkap untuk Multiplexer dan Peranan mereka dalam Sistem Digital]()
2025/09/20
Multiplexers adalah komponen dalam sistem digital, yang direka untuk menyalurkan isyarat input berganda ke dalam satu baris output menggunakan isyarat... -
Asas litar op-amp
![Asas litar op-amp]()
2023/12/28
Di dunia elektronik yang rumit, perjalanan ke misteri -misteri beliau selalu membawa kita ke kaleidoskop komponen litar, kedua -duanya indah dan kompl... -
Membandingkan perbezaan dan aplikasi NMOS dan PMOS
![Membandingkan perbezaan dan aplikasi NMOS dan PMOS]()
2024/11/15
Memahami perbezaan antara transistor NMOS dan PMOS adalah penting dalam merancang litar yang cekap.NMOS (N-jenis logam-oksida semikonduktor) dan PMOS ... -
CR2450 VS CR2032 Perbandingan: Semua yang anda perlu tahu
![CR2450 VS CR2032 Perbandingan: Semua yang anda perlu tahu]()
2025/09/15
Bateri butang seperti CR2450 dan CR2032 kuasa banyak elektronik setiap hari, dari jam tangan dan alat kawalan jauh ke peranti perubatan dan perindustr...










Bahagian panas
- GRJ32QR73A103KWJ1L
- MC7447AVU733NB
- RT0805BRE07137RL
- EP4CGX110DF31I7
- ADUM5200ARWZ-RL
- WM8976GEFL/RV
- STM8AF6268TDX
- LCMXO12OOC-3TN100C
- CGA4F4X7T2W153M085AA
- TAJA105K016H
- BCM59035C1IFB2G
- 171826-2
- TLV2473CDGQR
- X9429YV14-2.7
- ADS7818E/2K5G4
- LT1468IS8#PBF
- ZL50012QCG1
- MRF24J40MA-I/RM
- PIC16F1619-I/SS
- TPS60122PWP
- FPF2280BUCX
- GJM0335C1E6R2BB01D
- T495D226K035ATE125
- EPF10K10TC144-4N
- LT4356HDE-2
- S29GL01GS10TFI020
- LP8860HQVFPRQ1
- PS1080-A2
- X95820WV14IZ-2.7T1
- GRM0337U1H8R5DD01D
- MAX485CSA
- MBM29F080A-90PFTN
- TPA6160A2AYFFR
- MC74LVX32DR2
- LM3524DMX/NOPB
- PMB3520-8V
- BCM59056B0IUB1G
- ADXL372BCCZ-RL
- AD7846KPZ-REEL
- T495X336M035ZTE260
- VI-26R-MX
- BCM53115SKPBG
- DS2413DG-AA1-3C0+T
- XCR3960-7BG492C
- IDT54FCT244ALM
- TLE62306P
- TYE0HH221657RA
- MC10051BF1FAEA
- UPD61218AFA-100-EN7-A
- G20S-A